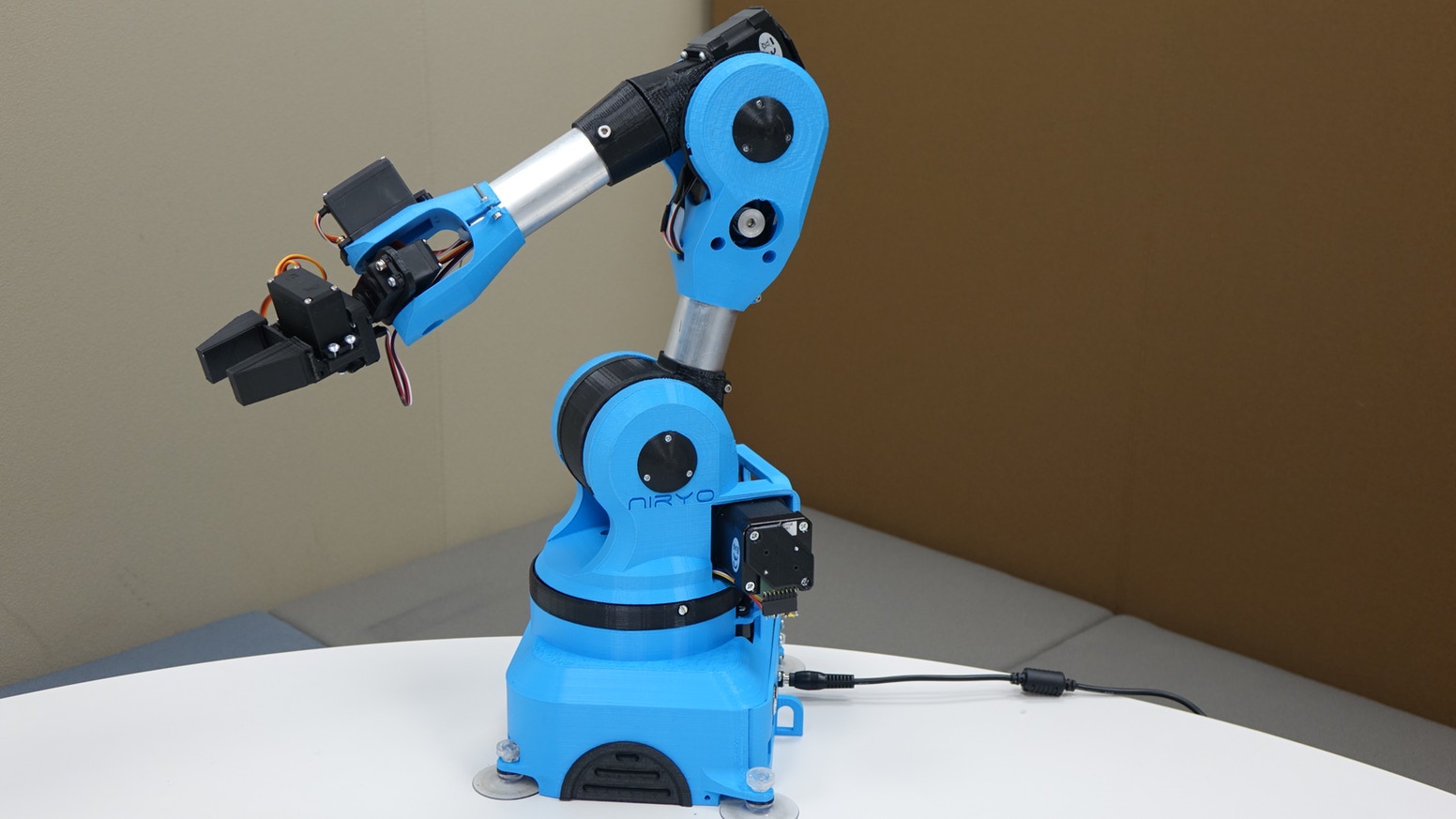
I would like to create a fab robotic arm with interchangeable effectors and six degrees of freedom for maximum movement.
The aim of this is to create the documentation so that any fab lab can create one of these robots and then once assembled will be able to 3D print the parts and mill the circuit boards required to make the arm.
I wish to control the arm using grasshopper as it is an accessible program that I know well and it has an Arduino interface called Firefly. The reason I would like to use Grasshopper is so models can be directly imported and analysed in grasshopper to create the toolpaths to put through the inverse kinematic equations and control the velocity of each of the axis. Through this I also hope to demystify some of the maths behind inverse kinematics.
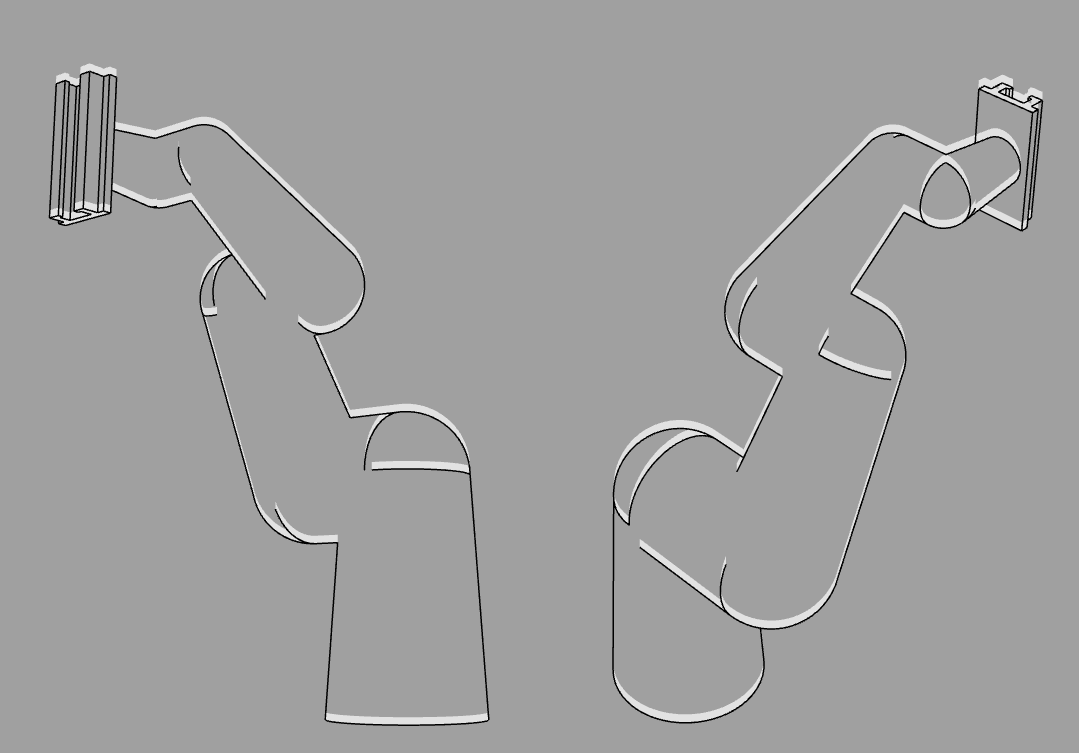
I have put together a quick sketch of what I would like to create, considering the axis of rotation at each of the joints
Previous projects
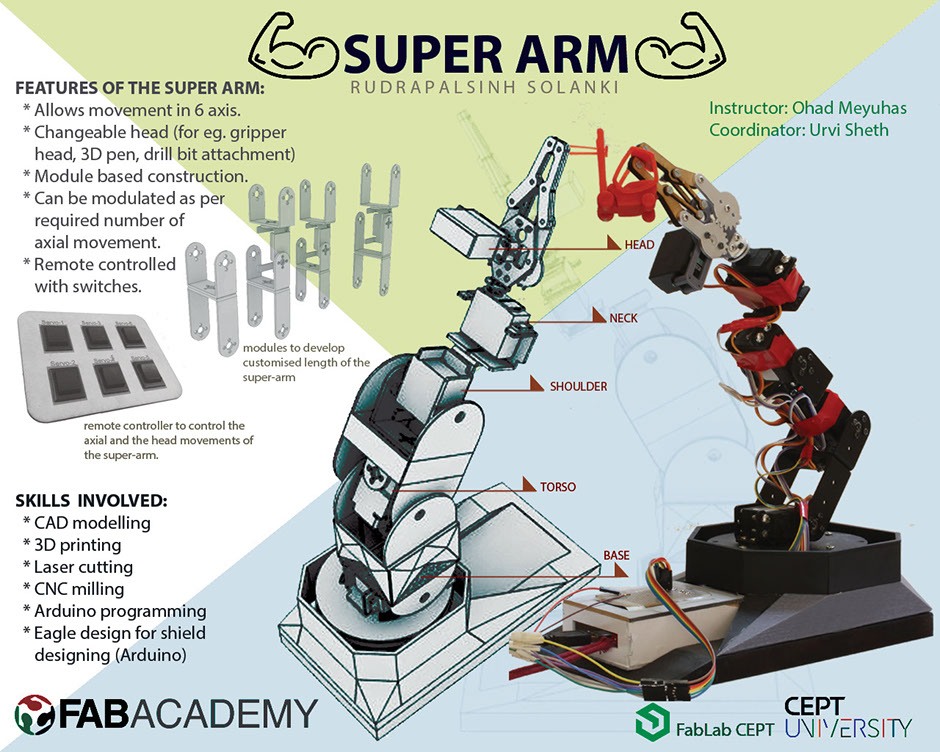
Fab Academy 2017 saw a few robot arm projects which I hope to build on:


There are also other open source robot arm projects which I hope to be inspired by: