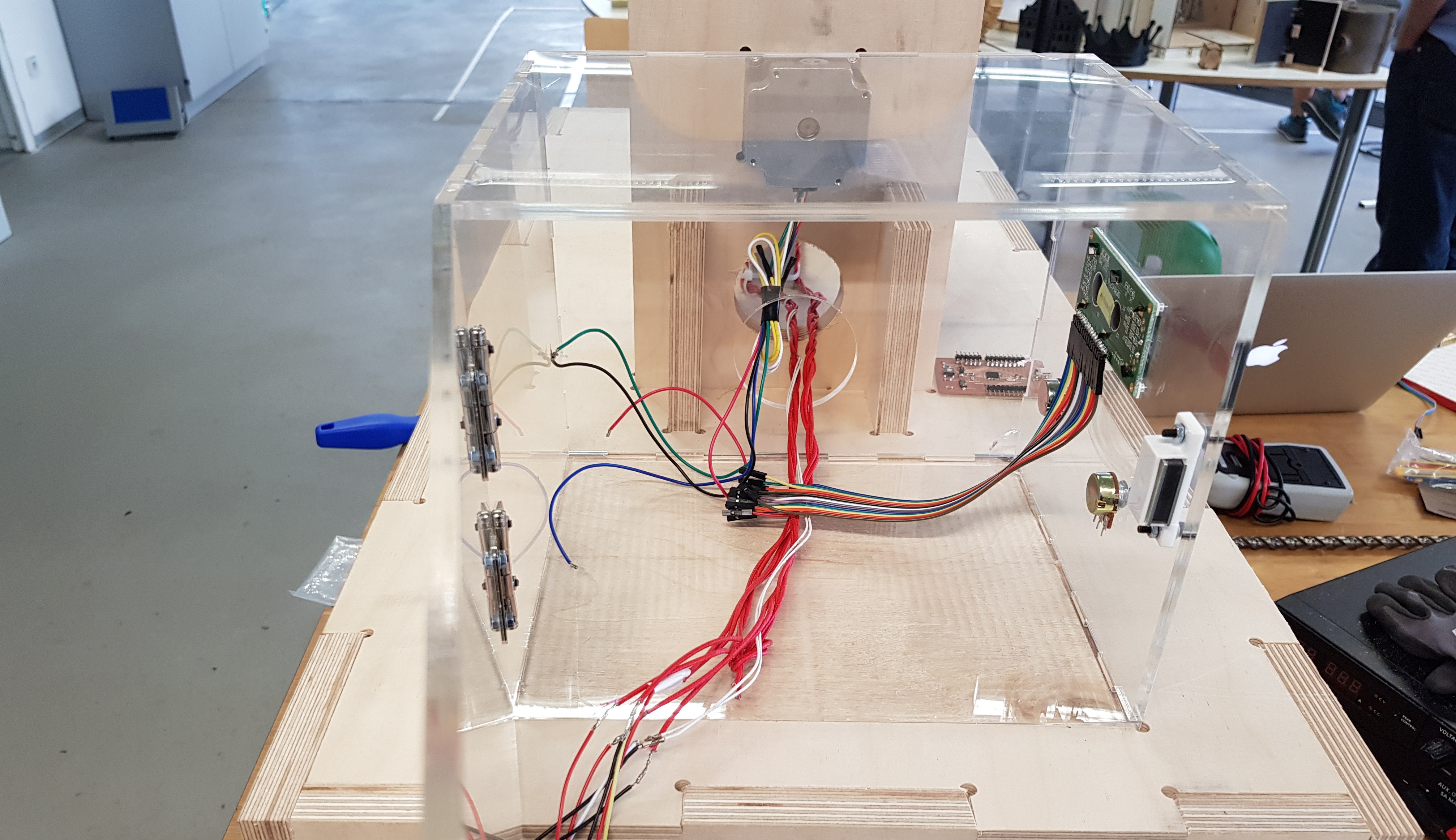
Ordering and recieving the parts that I needed went good without any delay.


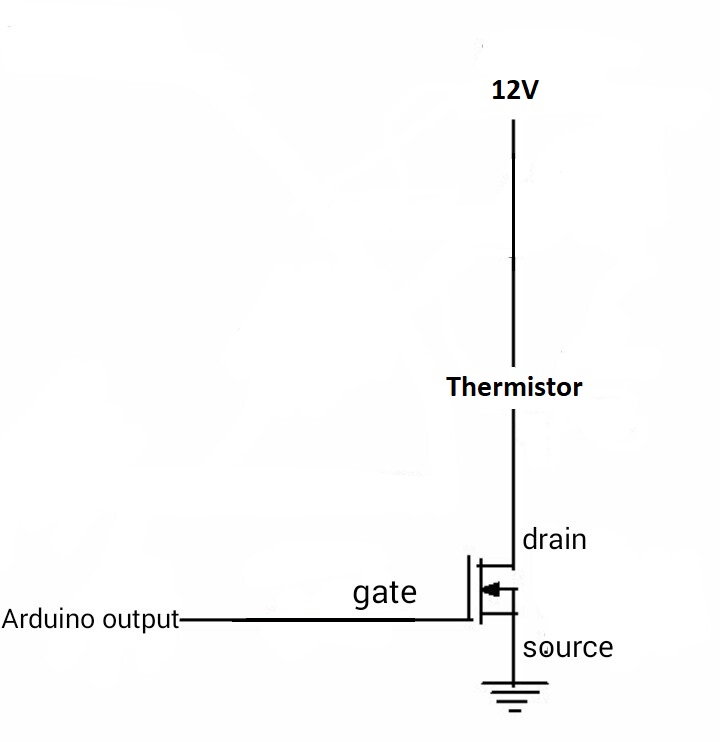
// which analog pin to connect
#define THERMISTORPIN A0
// resistance at 25 degrees C
#define THERMISTORNOMINAL 100000
// temp. for nominal resistance (almost always 25 C)
#define TEMPERATURENOMINAL 25
// how many samples to take and average, more takes longer
// but is more 'smooth'
#define NUMSAMPLES 5
// The beta coefficient of the thermistor (usually 3000-4000)
#define BCOEFFICIENT 4267
// the value of the 'other' resistor
#define SERIESRESISTOR 100000
#define rotPin A2
#define curPin A3
#define heatPin A4
float steinhart;
int rotVal = 0;
int curVal = 0;
int heatVal = 0;
uint16_t samples[NUMSAMPLES];
int tmp;
int stepPin1 = 4; // step pin
int dirPin1 = 7; // direction pin
int en = 8; // enable pin
int heaterPin0 = 6;
int heaterPin1 = 9;
int heaterPin2 = 10;
int heaterPin3 = 11;
void setup(void) {
pinMode(stepPin1,OUTPUT);
pinMode(dirPin1,OUTPUT);
pinMode(en,OUTPUT);
Serial.begin(19200);
pinMode(heaterPin0, OUTPUT);
pinMode(heaterPin1, OUTPUT); // sets the pin as output for Heaters
pinMode(heaterPin2, OUTPUT);
pinMode(heaterPin3, OUTPUT);
pinMode(rotPin, INPUT); // sets the pin as output for potentiometers
pinMode(curPin, INPUT);
pinMode(heatPin, INPUT);
delay(500);
}
void loop(void) {
rotVal = analogRead(rotPin); // read values for rotation spead
rotVal = map(rotVal, 0, 1023, 4000, 0); // map values for motor
curVal = analogRead(curPin);// read values for current
curVal = map(curVal, 0, 1023, 0, 255); // map values for current for analogWrite()
heatVal = analogRead(heatPin);// read values for Heaters
heatVal = map(heatVal, 0, 1023, 25, 250); //map values for Heaters
if(rotVal>3990){
digitalWrite(dirPin1,HIGH); // Enables the motor to move in a particular direction
digitalWrite(en,LOW); // send low singnal to EN in satstep
//one revolution
for(int x = 0; x < 200; x++) { // 200 steps/revol
digitalWrite(stepPin1,HIGH);
delayMicroseconds(rotVal); //here we manipulate the rotation speed
digitalWrite(stepPin1,LOW); //here we manipulate the rotation speed
delayMicroseconds(rotVal);
}
}
uint8_t i;
float average;
for (i=0; i < NUMSAMPLES; i++) {
samples[i] = analogRead(THERMISTORPIN);
}
// average all the samples out
average = 0;
for (i=0; i < NUMSAMPLES; i++) {
average += samples[i];
}
average /= NUMSAMPLES;
//Serial.print("Average analog reading ");
//Serial.println(average);
// convert the value to resistance
average = 1023 / average - 1;
average = SERIESRESISTOR / average;
//Serial.print("Thermistor resistance ");
//Serial.println(average);
float steinhart;
steinhart = average / THERMISTORNOMINAL; // (R/Ro)
steinhart = log(steinhart); // ln(R/Ro)
steinhart /= BCOEFFICIENT; // 1/B * ln(R/Ro)
steinhart += 1.0 / (TEMPERATURENOMINAL + 273.15); // + (1/To)
steinhart = 1.0 / steinhart; // Invert
steinhart -= 273.15; // convert to C
//Serial.print( analogRead(THERMISTORPIN));
//Serial.print("------------------\n");
//Serial.print("Temperature ");
if (steinhart < heatVal){
analogWrite(heaterPin0,curVal); //
analogWrite(heaterPin1,curVal); // analogRead values go from 0 to 1023, analogWrite values from 0 to 255
analogWrite(heaterPin2,curVal); //
analogWrite(heaterPin3,curVal);
}else if (steinhart > heatVal){
analogWrite(heaterPin0,0); // a
analogWrite(heaterPin1,0); // write 0 as soon as we arrived the desired heat
analogWrite(heaterPin2,0); //
analogWrite(heaterPin3,0);
}
//Serial.println(" *C");
// delay(1000);
}
#include <LiquidCrystal.h>
#define rotPin A2
#define curPin A3
#define heatPin A4
float steinhart;
int rotVal = 0;
int curVal = 0;
int heatVal = 0;
//String input;
// Connections:
// LCD pin 3 for contrants to GND, good for beginners
// rs (LCD pin 4) to Arduino pin 12
// rw (LCD pin 5) to Arduino pin 11
// enable (LCD pin 6) to Arduino pin 10
// LCD pin 15 to Arduino pin 13
// LCD pins d4, d5, d6, d7 to Arduino pins 5, 4, 3, 2
LiquidCrystal lcd(9, 8, 7, 6, 4, 3, 2); //!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!! Changed the pins, so that we can upload the code without chaniging the wires from pins 12 to 10
void setup(){
pinMode(rotPin, INPUT);
pinMode(curPin, INPUT);
pinMode(heatPin, INPUT);
//Serial.begin(19200);
lcd.begin(16,2); // columns, rows. use 16,2 for a 16x2 LCD, etc.
lcd.clear(); // start with a blank screen
// if you have a 4 row LCD, uncomment these lines to write to the bottom rows
// and change the lcd.begin() statement above.
//lcd.setCursor(0,2); // set cursor to column 0, row 2
//lcd.print('Row 3');
//lcd.setCursor(0,3); // set cursor to column 0, row 3
//lcd.print('Row 4');
}
void writeLCD(){
lcd.clear(); // clear the LCD
/*
lcd.setCursor(0,0);
lcd.print("CT:"); // change this text to whatever you like. keep it clean.
lcd.setCursor(4,0); // set cursor to column 0, row 1
lcd.print(input);
*/
lcd.setCursor(8,0); // set cursor to column 8, row 1 (the first row)
lcd.print("ST:"); // change this text to whatever you like. keep it clean.
lcd.setCursor(12,0); // set cursor to column 12, row 1
lcd.print(heatVal);//print desire heat val in C
lcd.setCursor(0,1); // set cursor to column 0, row 1 (the first row)
lcd.print("RS:"); // change this text to whatever you like. keep it clean.
lcd.setCursor(4,1); // set cursor to column 4, row 1
lcd.print(rotVal);// print desire rotation speed in %
curVal = map(curVal, 0, 255, 0, 100); //map current values to %
lcd.setCursor(8,1); // set cursor to column 8, row 1 (the first row)
lcd.print("CR:"); // change this text to whatever you like. keep it clean.
lcd.setCursor(12,1); // set cursor to column 12, row 1
lcd.print(curVal); // print output for current change in analogWrite
}
void readPins(){
rotVal = analogRead(rotPin); // here we read the values from the potentiometer (analog pin A2)
rotVal = map(rotVal, 0, 1023, 0, 100); // here we map the value from the potentiometer to %
curVal = analogRead(curPin); // here we read the values from the potentiometer (analog pin A3)
curVal = map(curVal, 0, 1023, 0, 255,);// here we map the value from the potentiometer
heatVal = analogRead(heatPin); // here we read the values from the potentiometer (analog pin A4)
heatVal = map(heatVal, 0, 1023, 25, 250);// here we map the value from the potentiometer
}
void loop(){
readPins(); // call the readPins() function
writeLCD();// call the writeLCD() function
delay(100);
}
}