
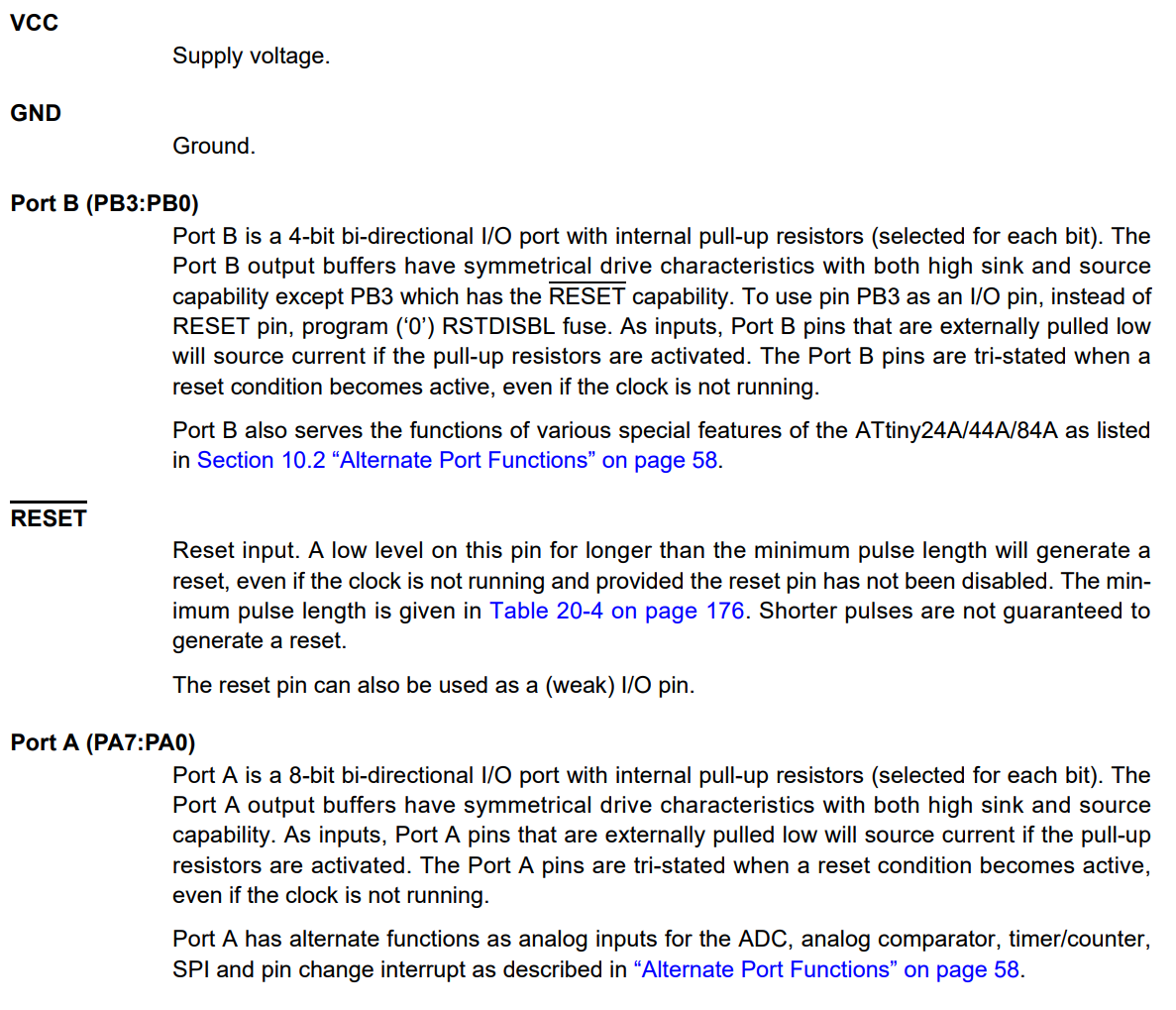
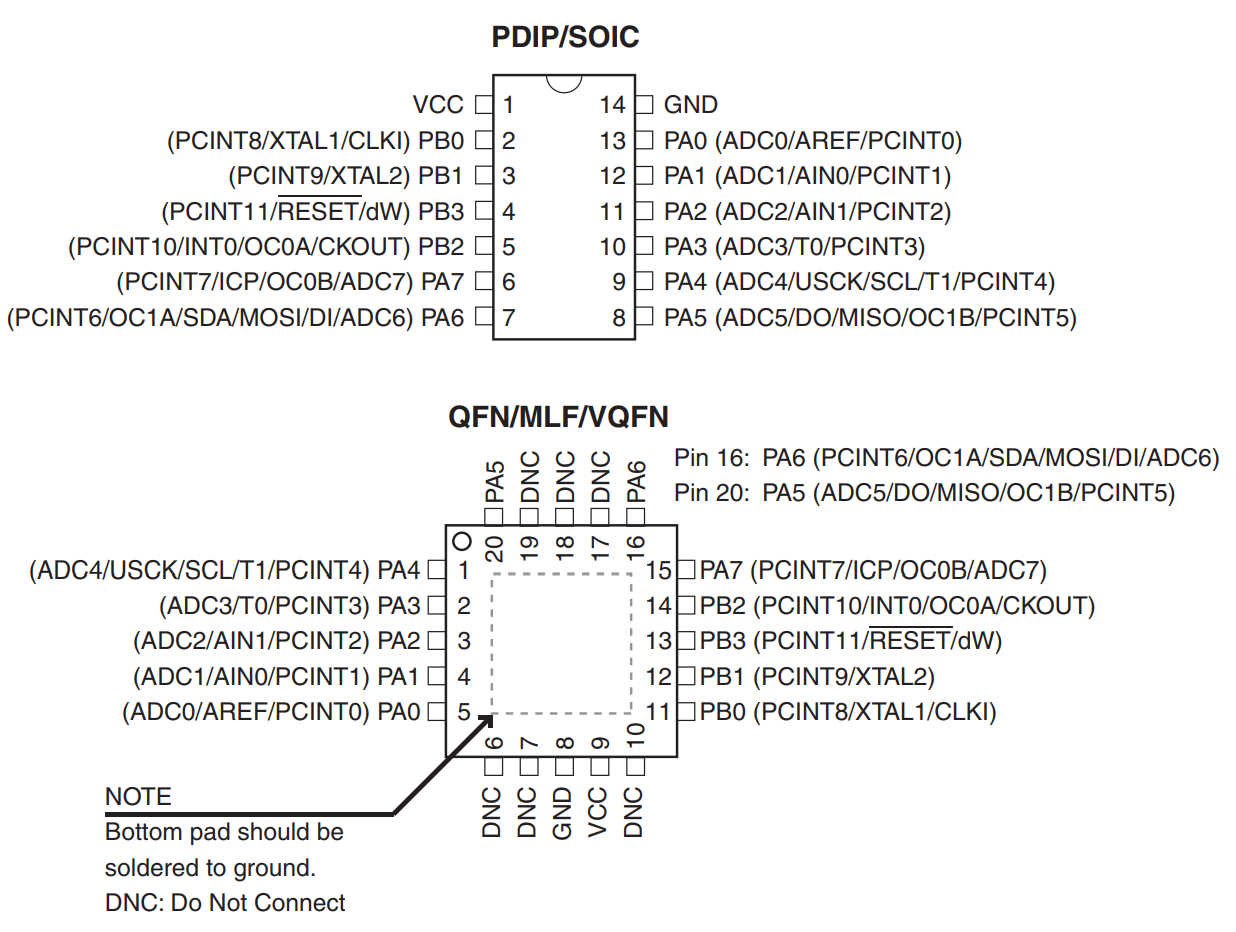

The ATtiny 44 has 2 sets of these (PA and PB). For port A (PA0-PA7) we use the DDRA command.
To set all pins of PORT A as output we should write :
DDRA =0xFF or DDRA =0b11111111.
Where:
- "1" represents output.
- "0x" represents hexadecimal value
- "0b" represents binary value
PORTA |= (1<<7) or PORTA |= (0b10000000)To set any port as low we write
PORTA |= PORTA &= ~(1<<7) or PORTA &= ~(0b10000000)
/*
* led_blink.c
*
* Rohan Rege
*
*/
#define F_CPU 20000000 //Define clcok speed as 20Mhz
#include <avr/io.h> //Import header file required for AVR microcontrollers
#include <util/delay.h> //Import header flie required for delay function
int main(void)
{
DDRA = 0b10000000; //set PA7 as output
while (1) //Infinite Loop
{
PORTA |= (1<<7); // Set PA7 high (Make LED ON)
_delay_ms(5000); //delay of 5 sec
PORTA &= ~(1<<7); // Set PA7 low (Make LED OFF)
_delay_ms(5000); //delay of 5 sec
}
}
To flash this program, I've used Atmel Studio on windows.Download and install atmel studio the go to file -> New -> Project
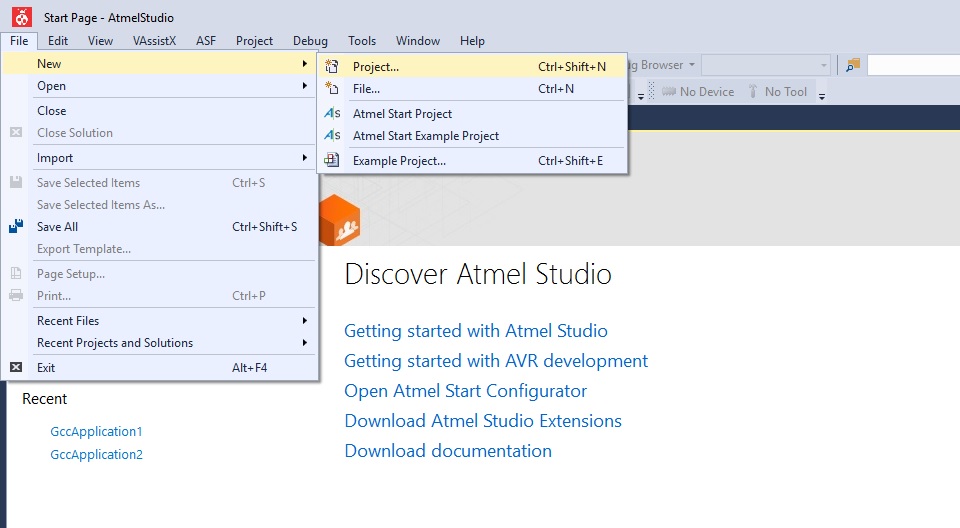
Then select the second option in GCC Executable Project C/C++
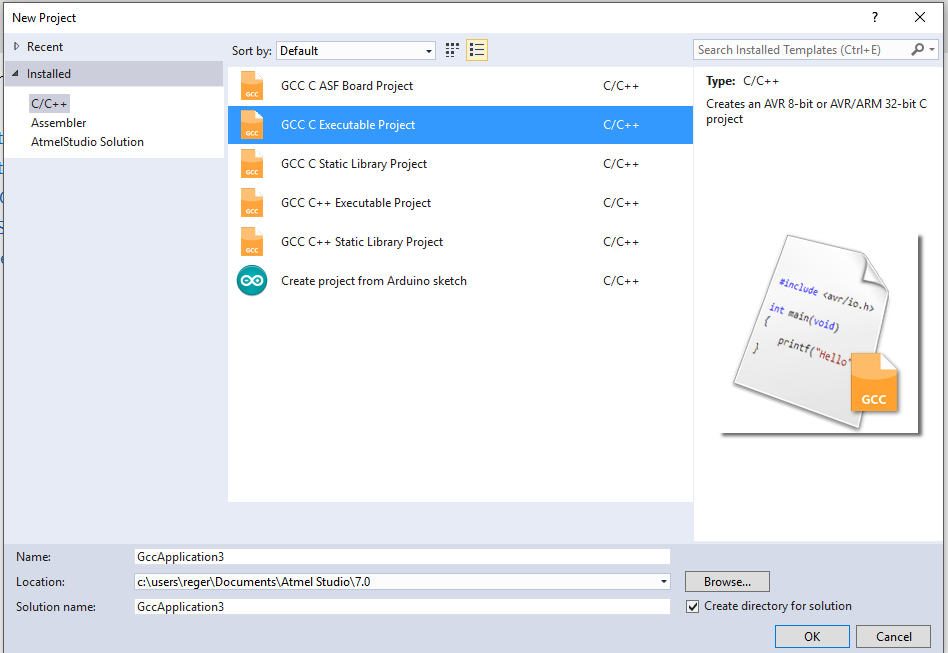
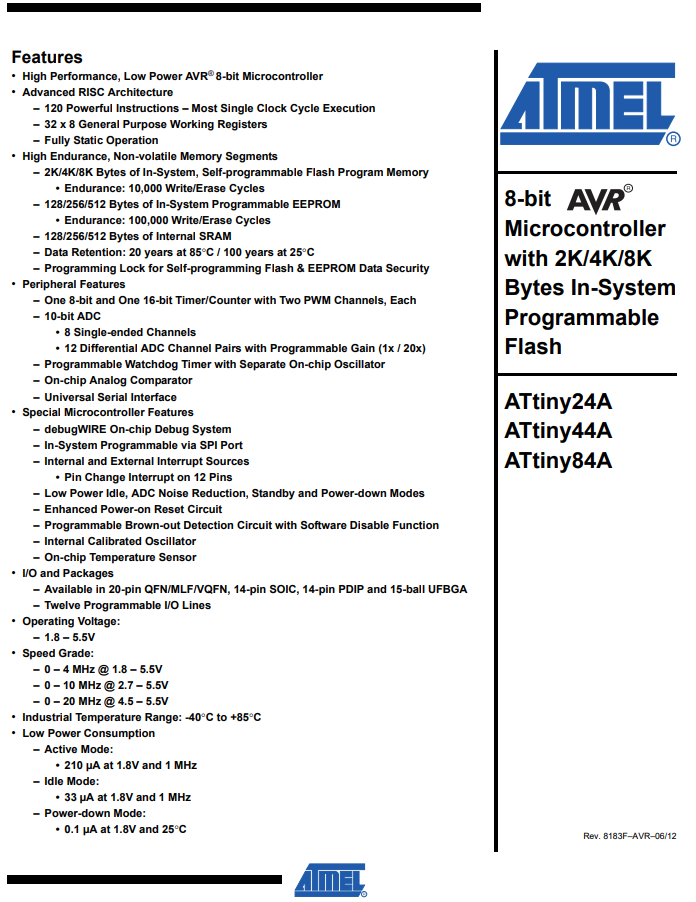
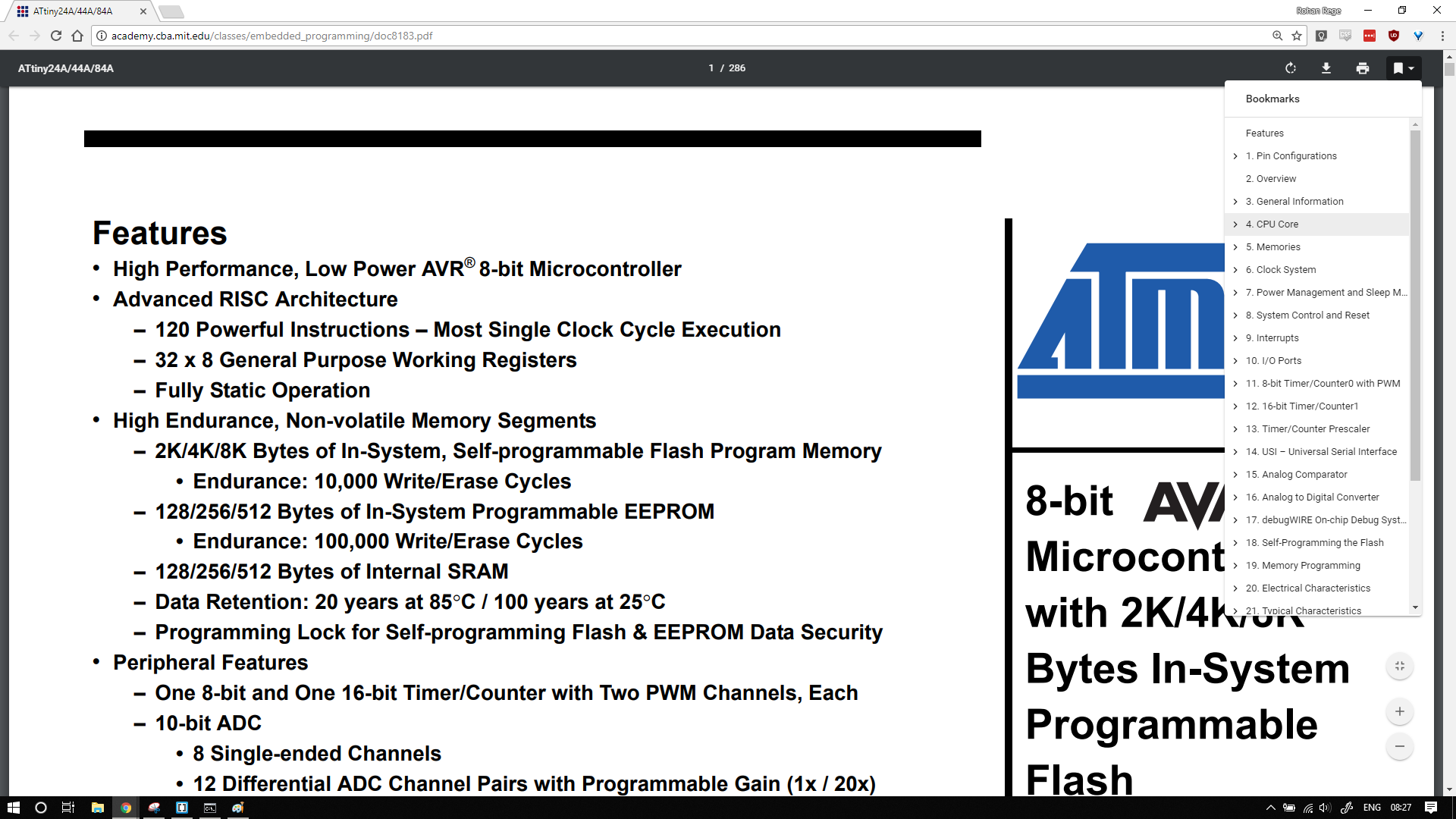
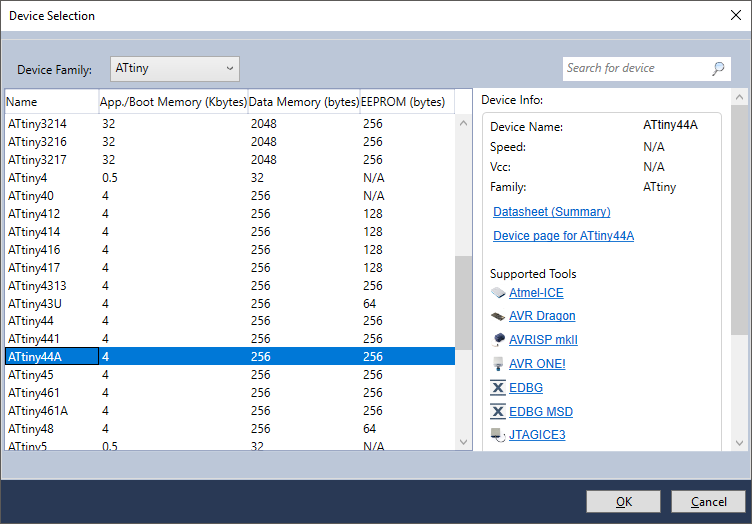
Then select the IC
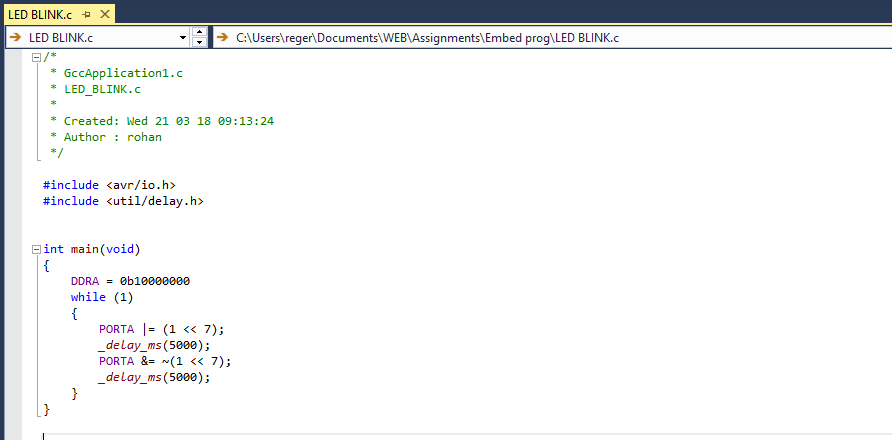
Then copy the above program in the file
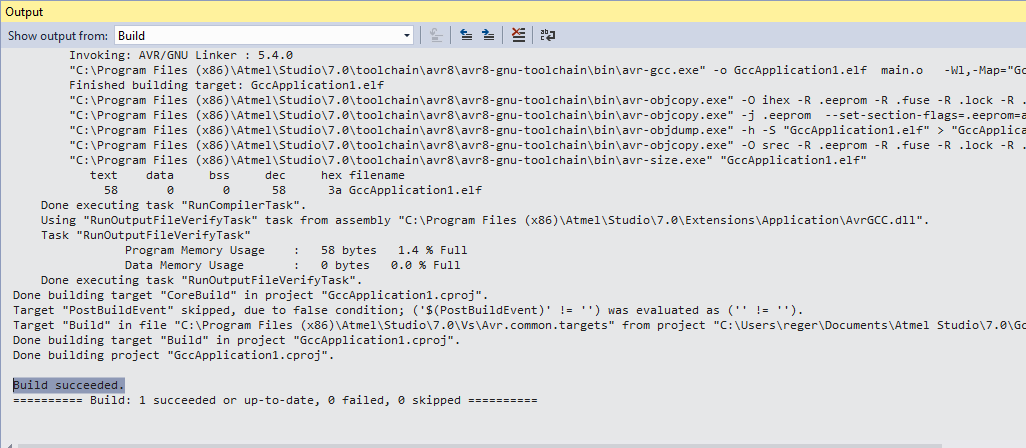
Save the file and click on build project
The output of the build should look like this
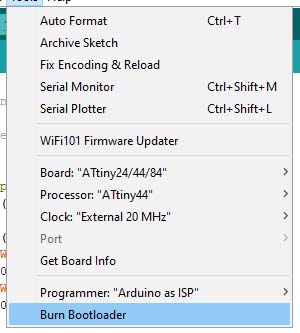
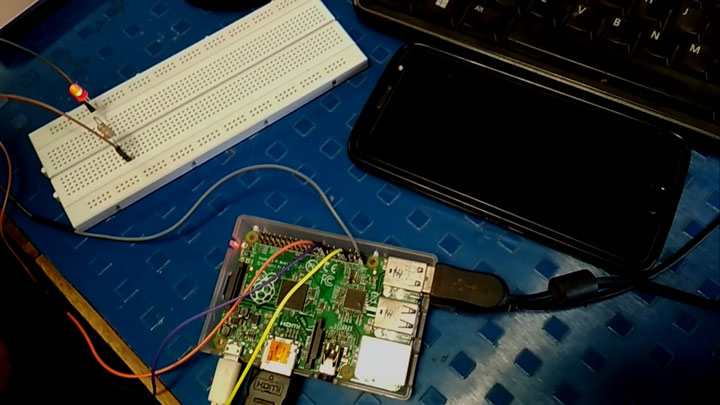
To program by the USB tiny we need to set it up.
To do that add it to the external devices of the atmel
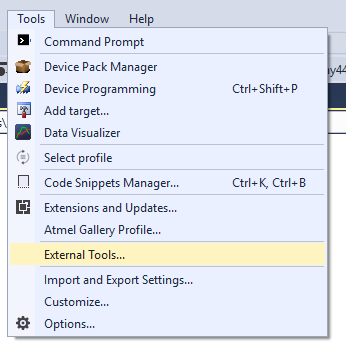
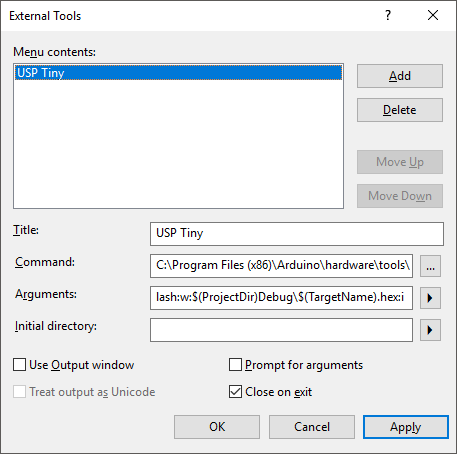
Then build the again go to external tools and select the TINYUSB
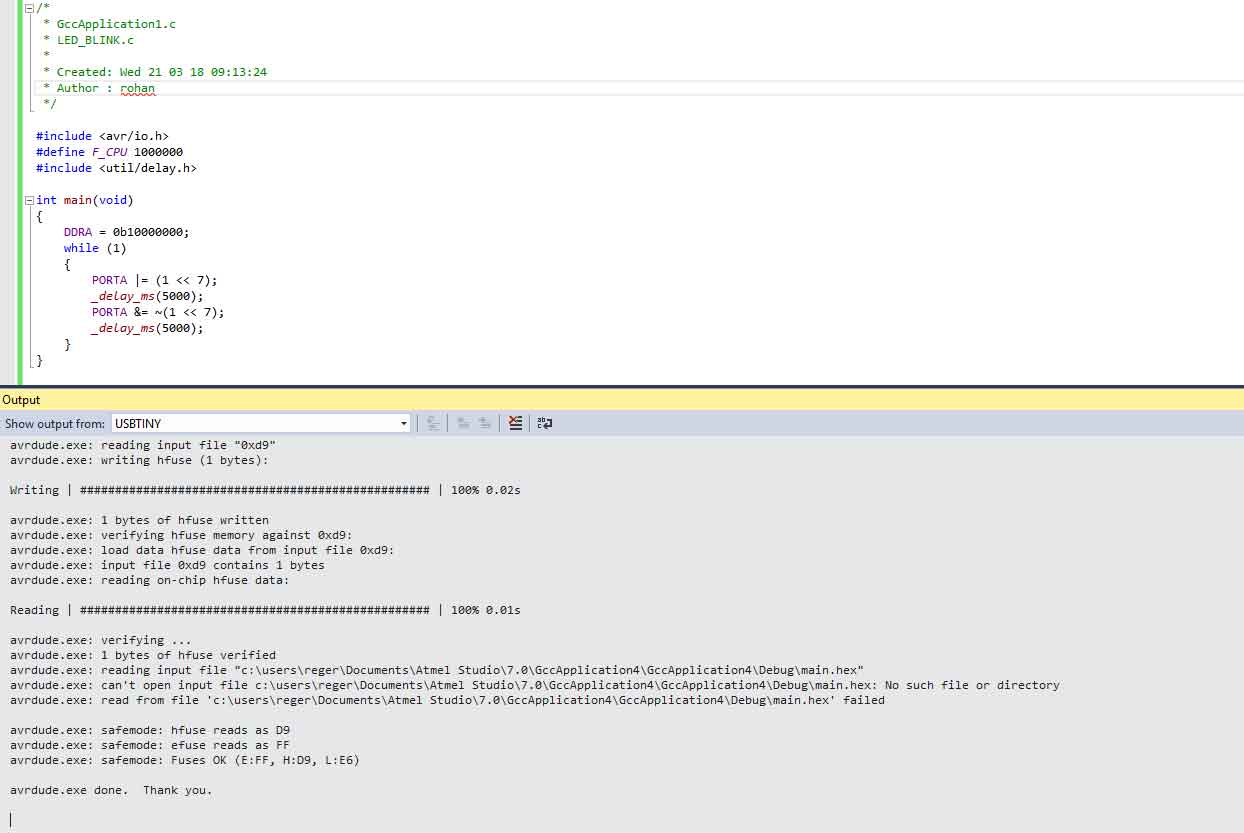
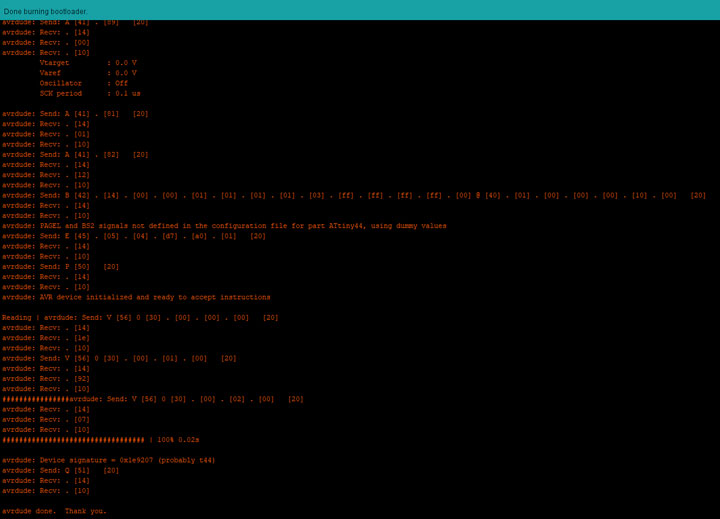
This output looks like this:

Assembly is a lower level language than Python and Embedded C.
Assembly language is an alphanumeric representation of machine code. Below is an example of a AVR assembly code written in assembly language. Each line of the code is an instruction telling the micro controller to carry out a task.
ADD R16, R17 ; Add value in R16 to value in R17
DEC R17 ; Minus 1 from the value contained in R17
MOV R18, R16 ; Copy the value in R16 to R18
END: JMP END ; Jump to the label END
I have used the cbi and sbi to directly modify the registers.The code is sourced from here
.device attiny44
.org 0
sbi DDRA,0
loop:
sbi PORTA,0
cbi PORTA,0
rjmp loop
I was going to try and follow the tutorial by Steven Chew to program IC in assembly.
But the it proved too challenging for me.
Also I could not justify the time required to program in assembly.
I'll not do anything that I don't understand hence I will not program this.
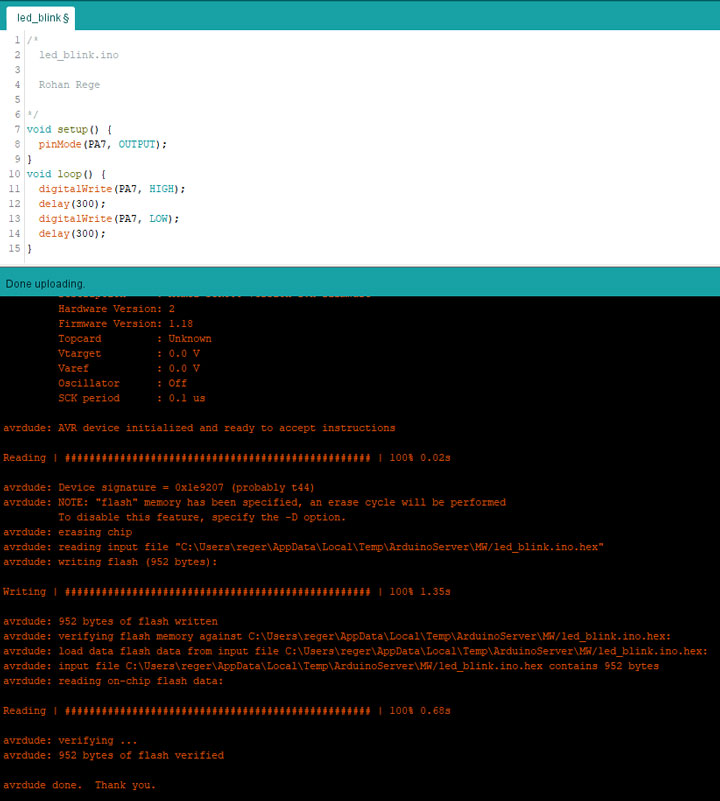
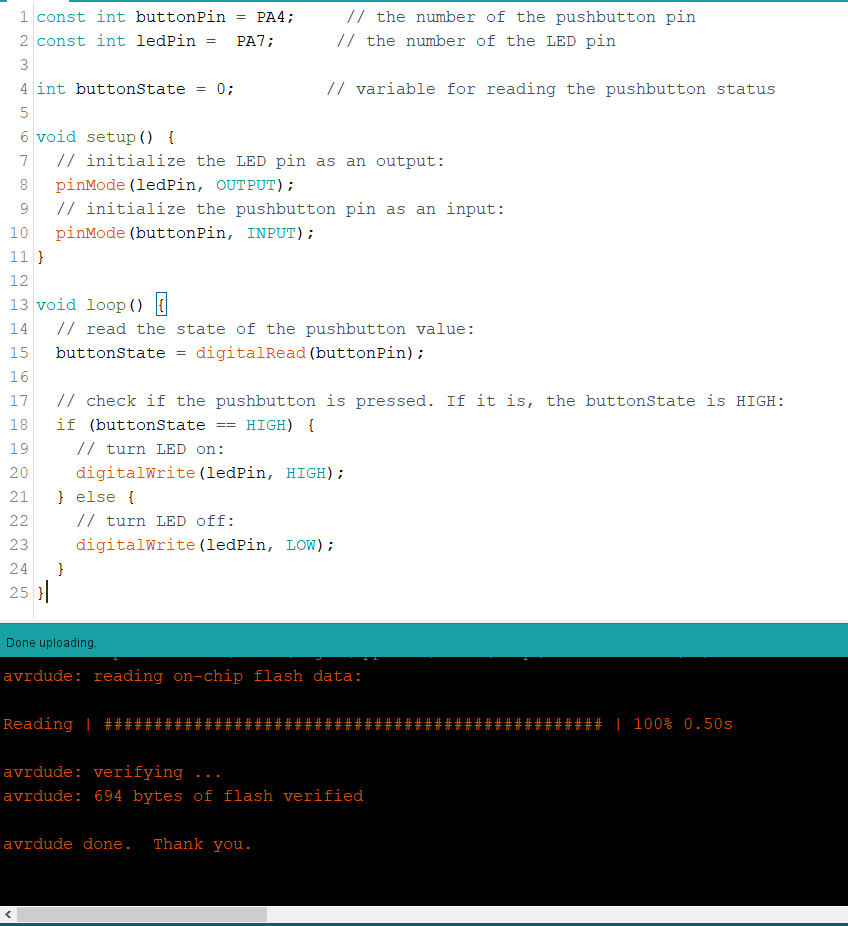
The arduino language is really great for beginners, but have some limitations (e.g. you must have all your files in the same folder). And it is basically a simplification of C/C++ (you can practically copy & paste arduino code to a C/C++ file, and it will work). Also it makes sense that you can go and use a full well known IDE as eclipse if you are experienced
/*
led_blink.ino
Rohan Rege
*/
void setup() {
pinMode(PA7, OUTPUT);
}
void loop() {
digitalWrite(PA7, HIGH);
delay(300);
digitalWrite(PA7, LOW);
delay(300);
}