
Mechanical Design
- 1. Make a machine, including the end effector, build the passive parts and operate it manually

Mechanical Design
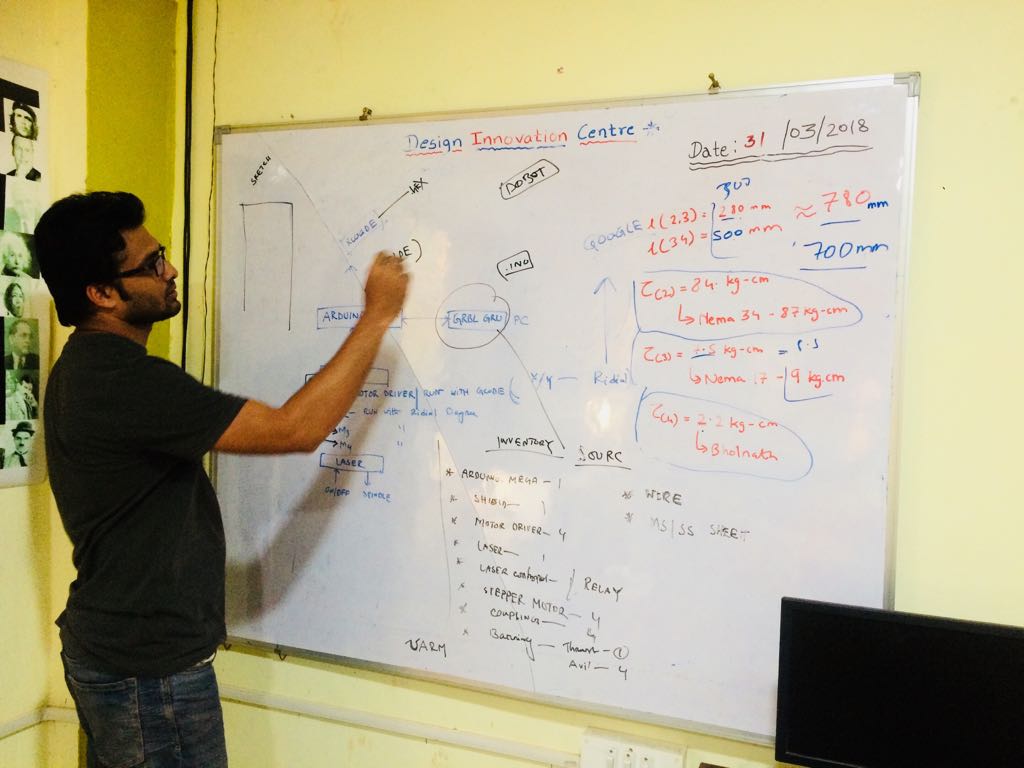
For this week assignment we start first with the sketches from the begging. In mechanical design here we works as group but most of the role goes to Rohan Rege, Cheitaniya. for designing purpose and in methodological level i was work and gave my opinion and what ever I understand I did my job.
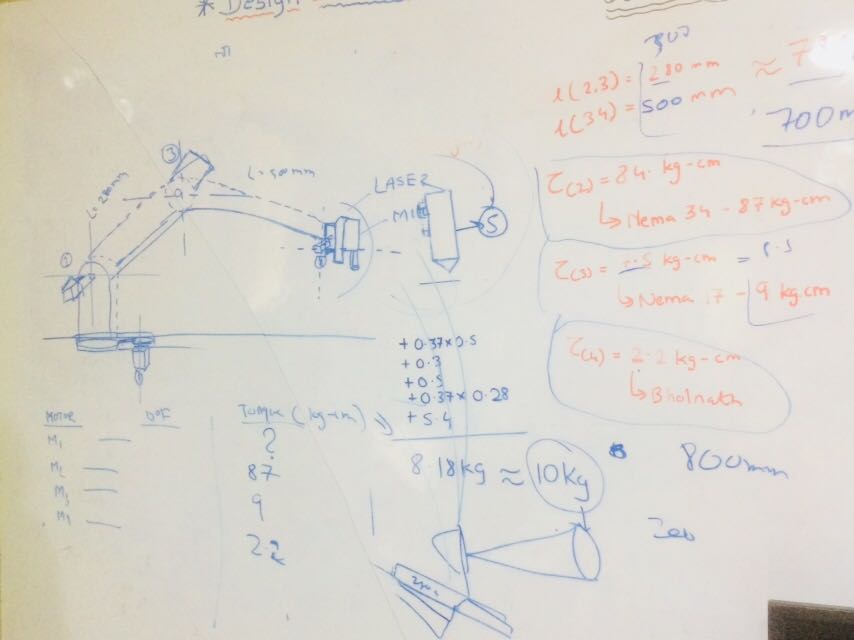
We first start the design, how actually we will start, what type of materials we will used. Most importantly the motor and how much torch will be this motor. Rohan make a calculation initially and he share with us and we also add some comments on it.
Time is going so fast, we have no more time, we work together, and try to find out the proper calculation, In here we make a one decision finally and we are going to design in Solidworks as mention calculation.

In parallel, Yogen, and Rutvij they both of are working on the End effector, How is going to design, how it attached with the end point of the arm. I think they will find out the effective result at the end.
We tested the arm length in different materials and understood that which one is the better for control by motor and holding the end effector.
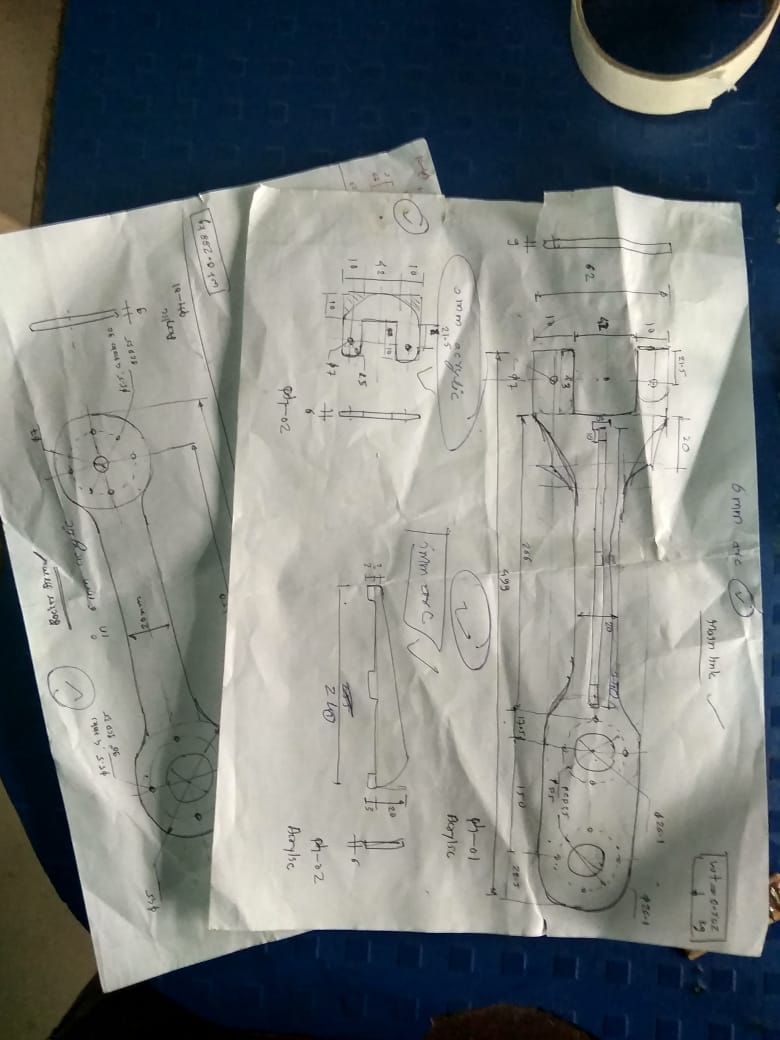
This is the calculation about how much arm length could be better option, still we know that for save farming this is beyond the limit/
MDF Testing: after finalize first we make a ordinary MDF cutting look like hand are give us an idea.

This is the final project
So, This week and next week are maintain as lab website, all design and and methodology you can find in that site.
Then we make a sample cut of me ARM for understanding the our methodology. After that we cut another in big shape and here we add four arm mechanism in next images


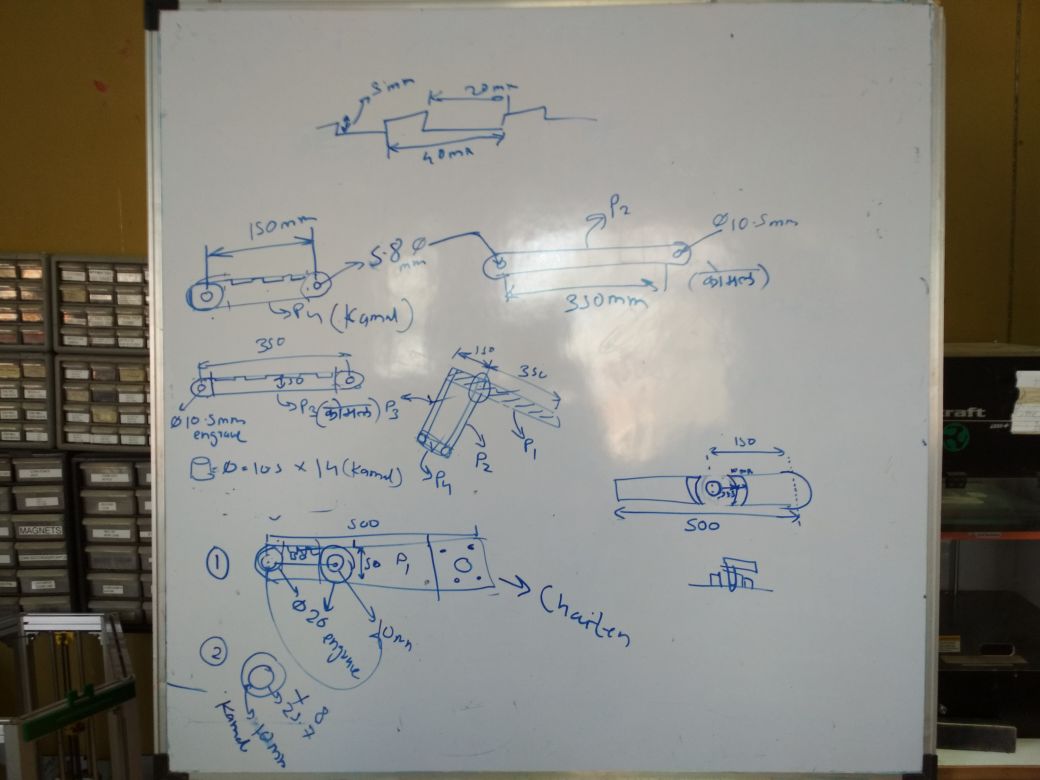
In this week as individually I did one mechanism part, it's like one joint in the upper part of the ARM. Making a radial triangle. In the mechanism the ARM part movement will be same direction as like if it move forward 10 mm same as for back back move 10mm. First I study this and got a open source from meARM, In meARM they also use this mechanism. If you use this mechanism where you don't need to use extra motor for movement. Instead of motor we use it and reduce the torque of the base motor.


After all this weeks is group assignments, so in this week i learned something quit interesting like