You can see the previous documentation in this >>link<<
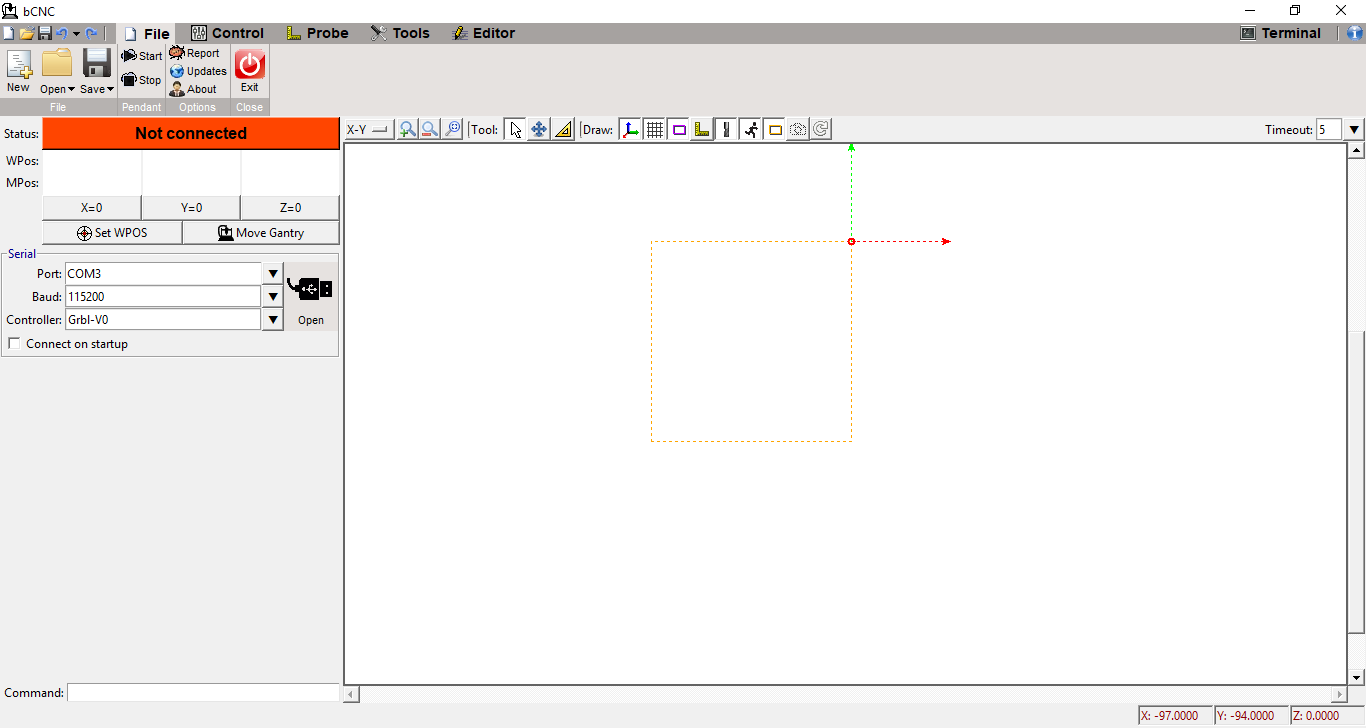
In the assignment I search the way to move the machine, and I use the next bCNC to the interface and the movement, next I show you how installed and use.
To download you can go to finish of page or in this >>link<< in this site you can find more information.
Also, you need download Python >>page<<.
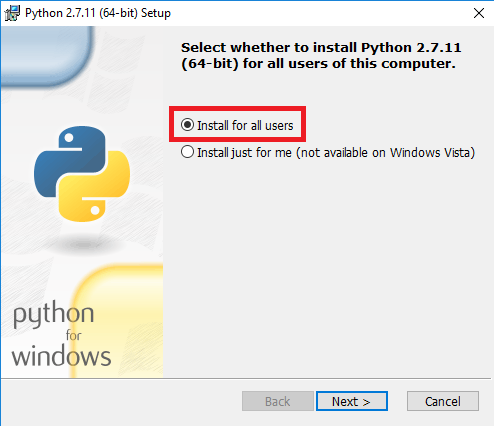
first we will install version 2.7.11 preferably Python, in the window to appear of the moment to intall select

Next open the cmd in your computer.
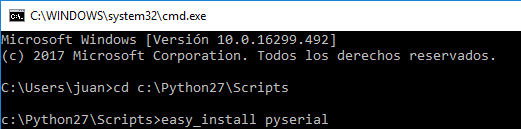
Next open the cmd in your computer and go to the folder scripts with the command cd, in the folder use the command easy_installer pyserial and press enter and show you a message in the end you can see in the image.
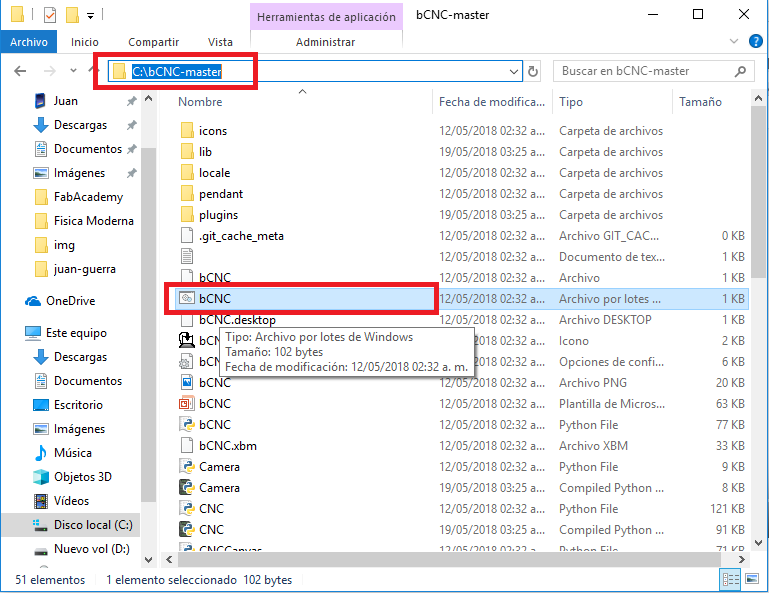
Then copy the folder of bCNC into of the local disk C:.
In the folder bCNC copy the file at desktop.
To move the machine with this with a Arduino mega and a Grbl code you can see the next >>tutorial.<<
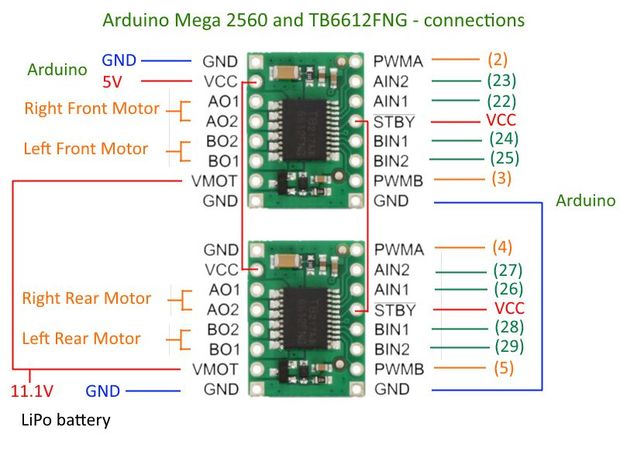
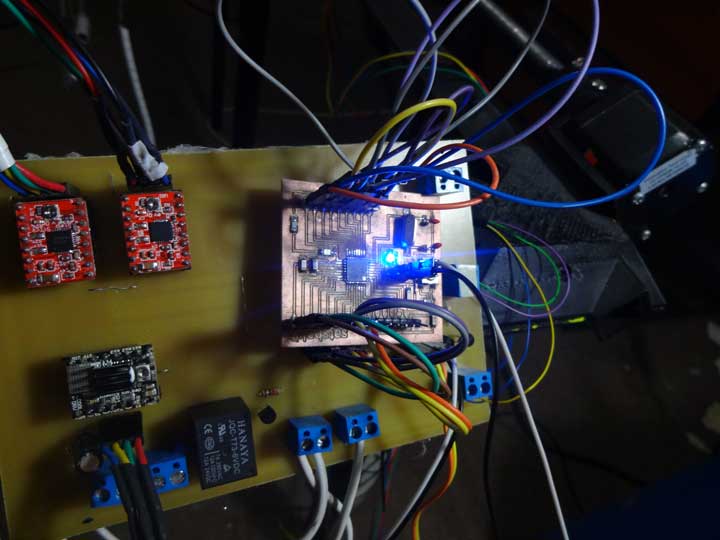
I use the driver tb6612fng, and the configuration of this driver is different to use with the GRBL software and the Arduino.
The different is because this driver have two pwm pin and digital pin to control the turn of each motor.

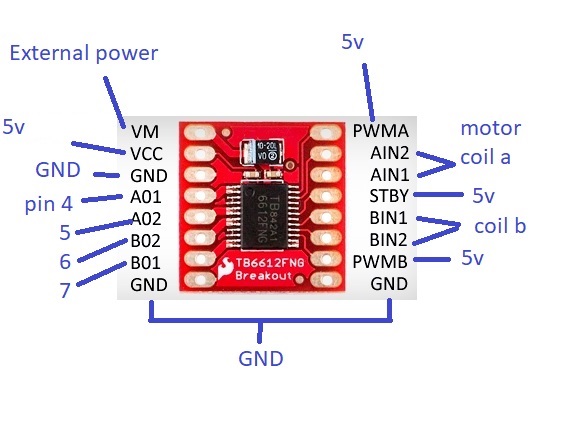
To the connection of the driver to motor you can use the pwm pin of satsha like to digital and connect all the inputs of the driver, in the driver in Vm you can give 12v but if the driver gets too hot it can shrink to external 5v or use a heat sink and add it, do not forget to connect to the GND is very important of the satsha, driver and the external power.

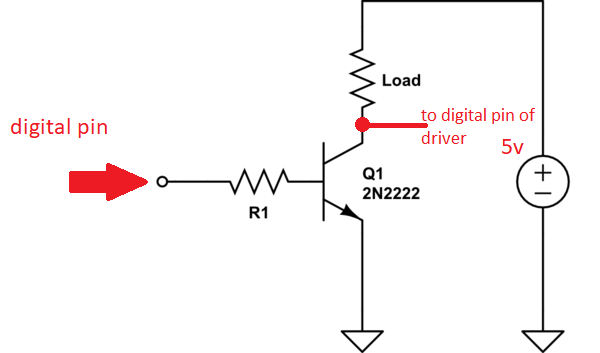
The machine uses two motors to move in an axis, and to move this axis need the same signal among them and for this I use a transistor to give the same signal at two.
The type of transistor that I use is 2n2222, in this link I leave the >>datasheet<<, the transistor is type NPN, the configuration you can find out like switching with transistors.
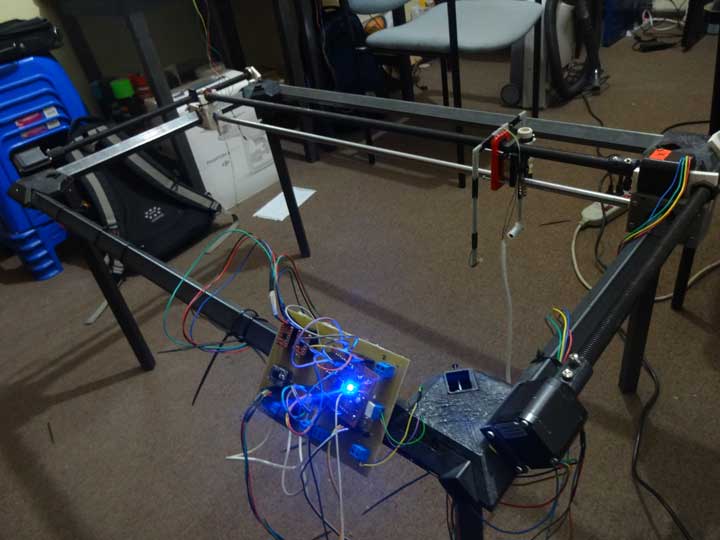
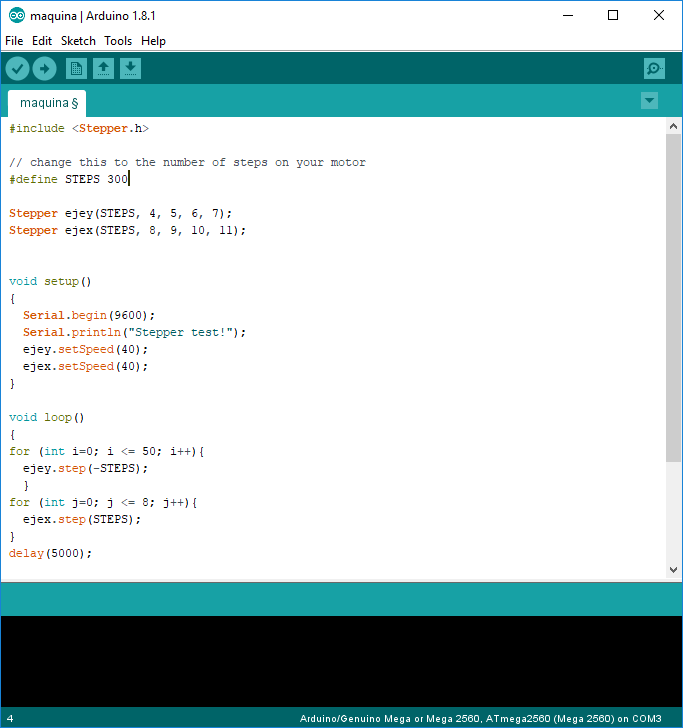
To move the machine, I make a program in Arduino.
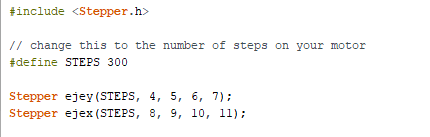
In the program use the library stepper.h, then define the pass of the motor with the next command, after that assign the pins to use and add the number of stepper that use defined above.
In this comand you can set the velocity of the motors.
In the void loop use the command ejex.step(STEPS) to move one axis of the machine and with a sentence for use to define the number of stepper in the moving, you can change this varying, when you change the command with ejex.step(-STEPS) is to move to the opposite side.
to improve the movement of the machine we use the universal gcode platform software to control the movement of the machine using the a4988 driver’s whit the same grbl for Arduino. You can have more information about the software in the following >>link<<and if you
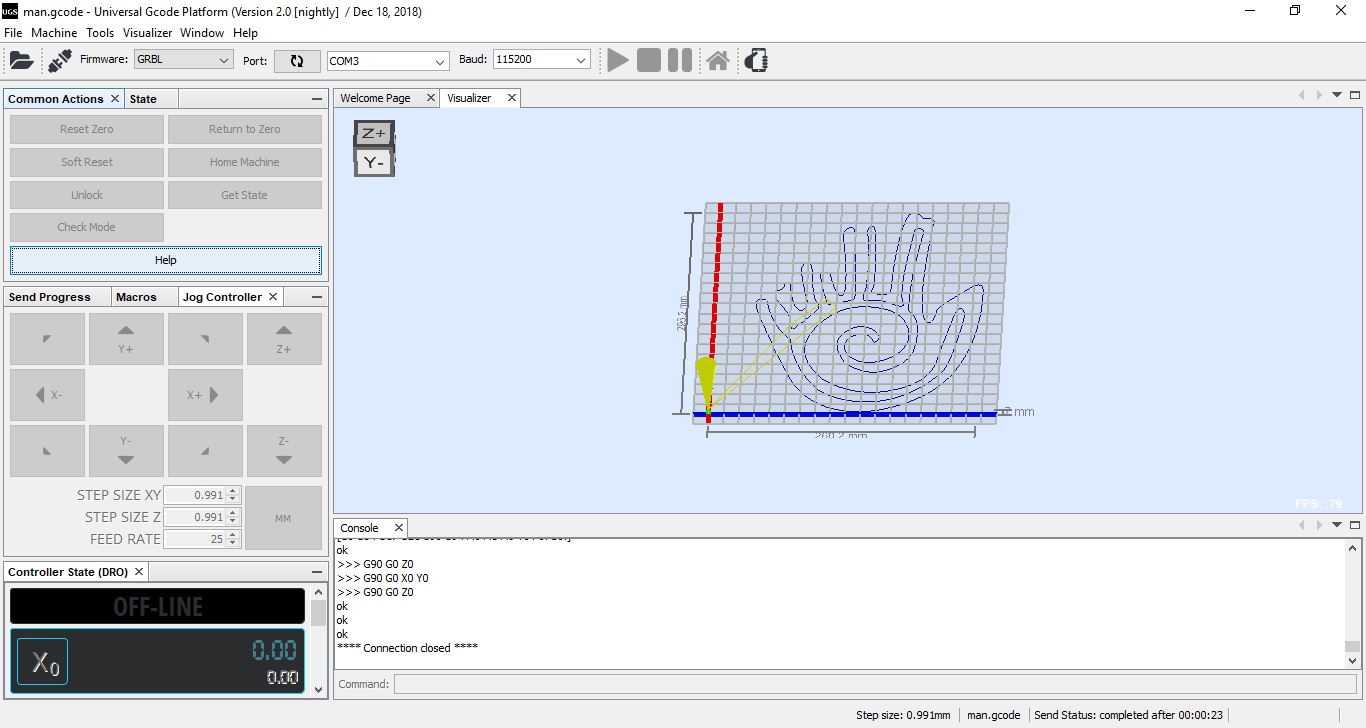
This software is much easier to use because it does not need a great process to install it, the only thing you have to keep in mind is that it uses java for its execution. Download it in this >>link<< if you do not have it.
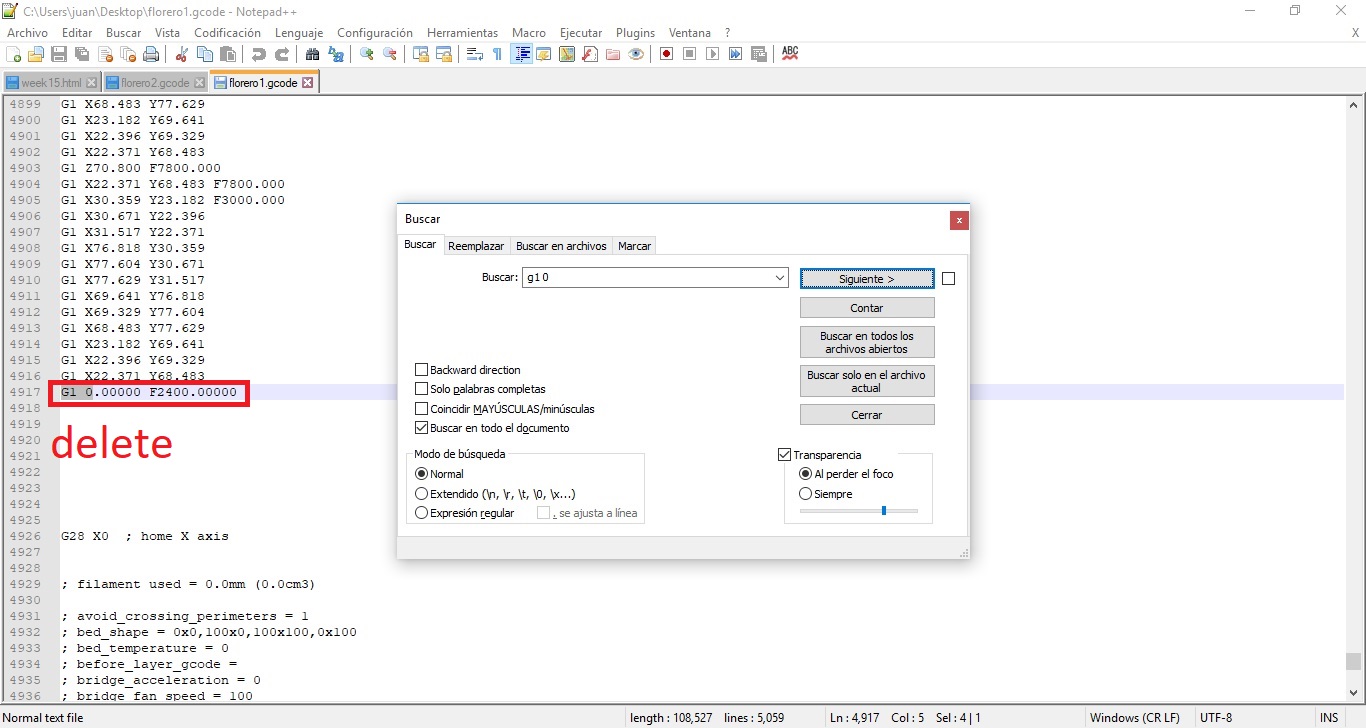
a precaution that must be taken is when these error messages appear that the software gives, it can be at the beginning, end or any time of the execution of the code g.
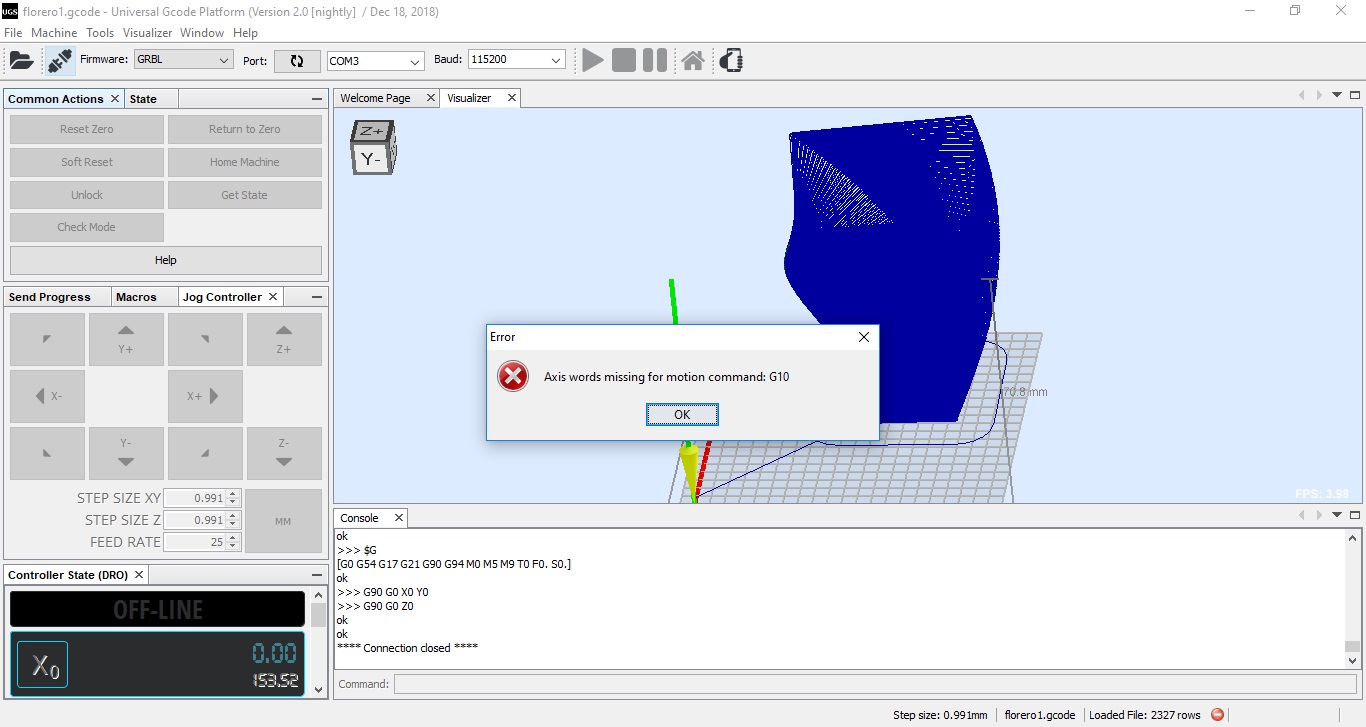
in order to solve this problem, you must open the gcode file with any editor in my case I use the notepad software to be able to eliminate this error.
since the editor shows the lines of code to execute the only thing that is done is to look for the code line shown as an error and eliminate it at every moment that it stops in the program.
Files in Repo