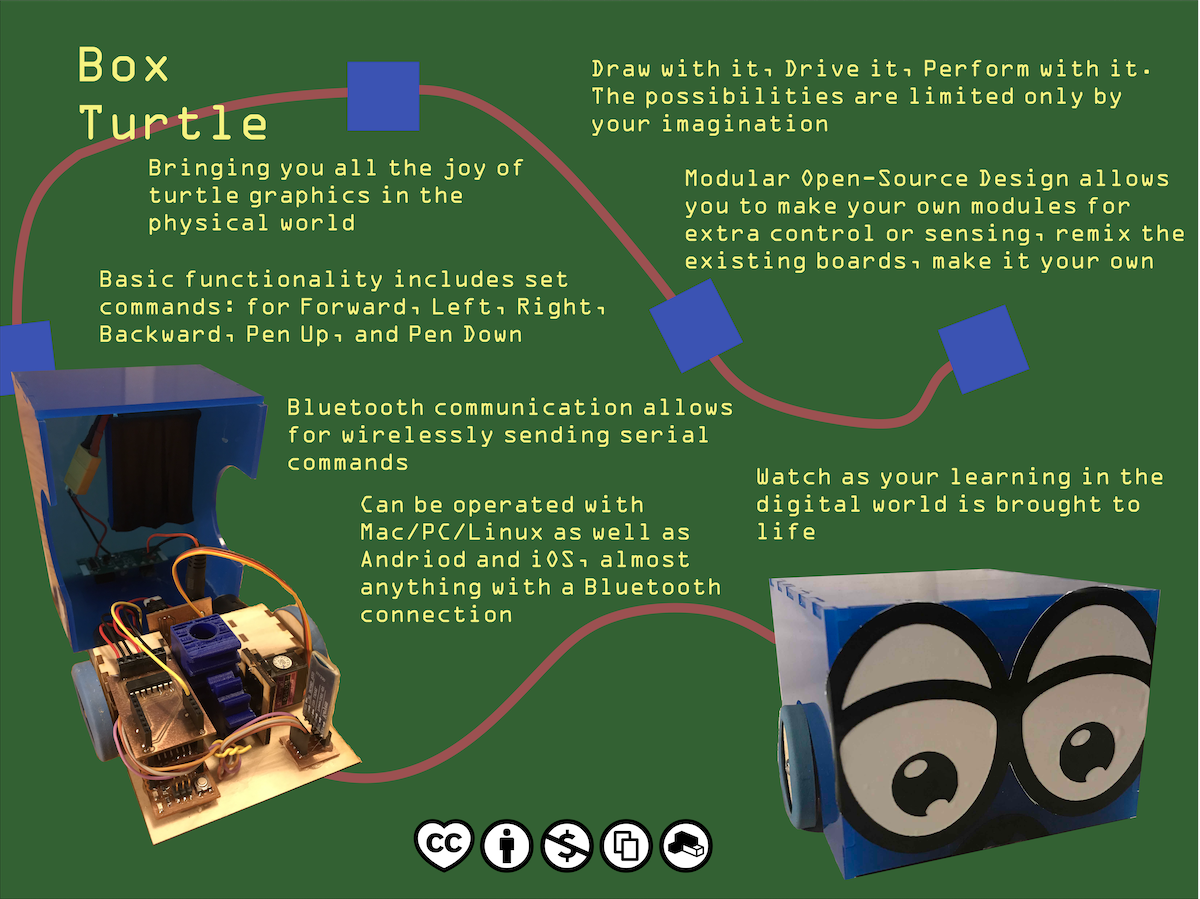
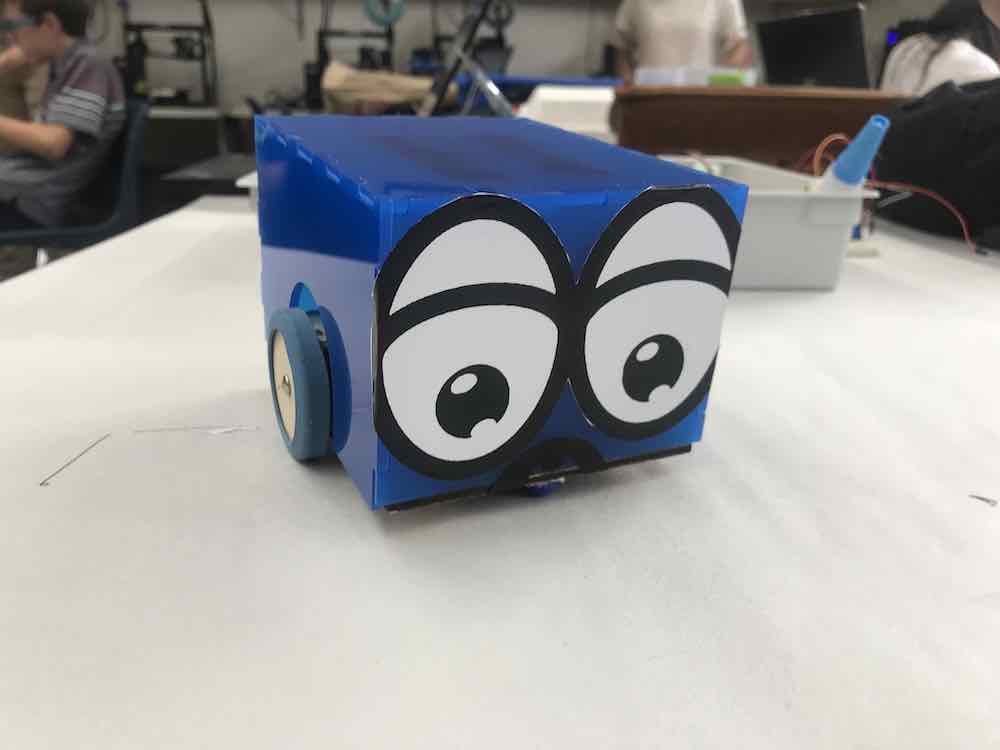
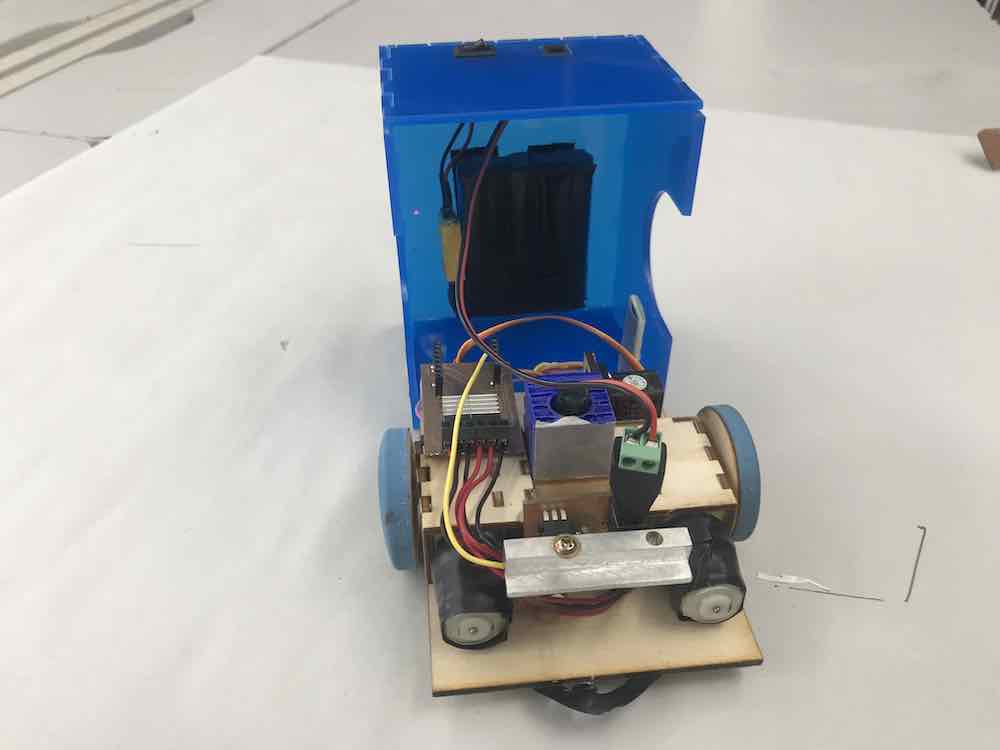
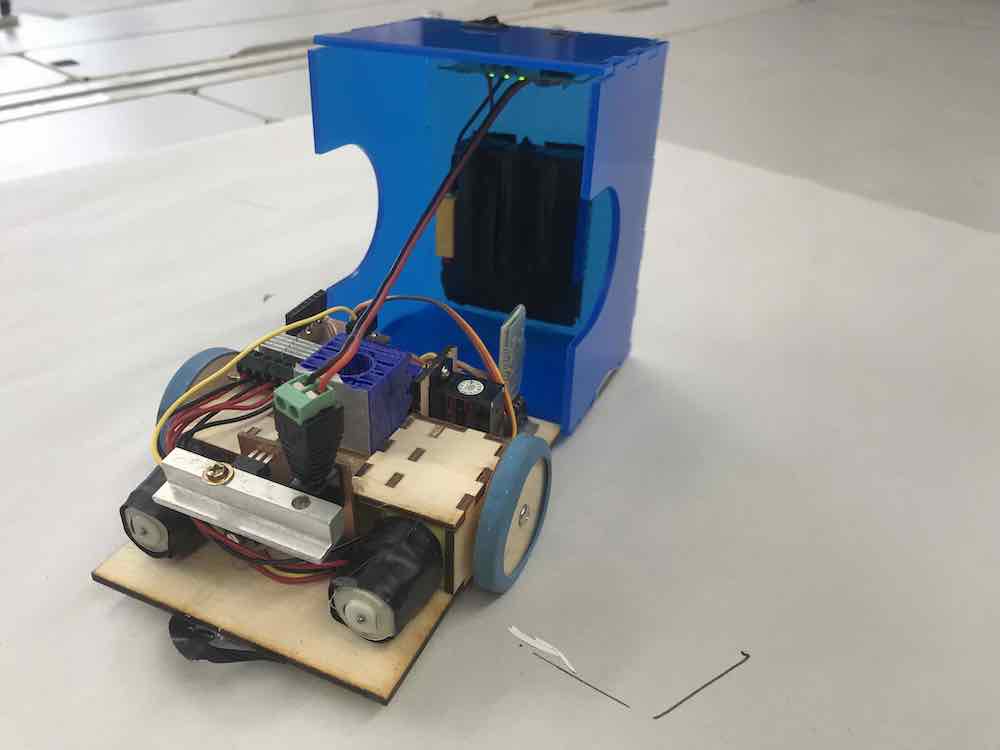
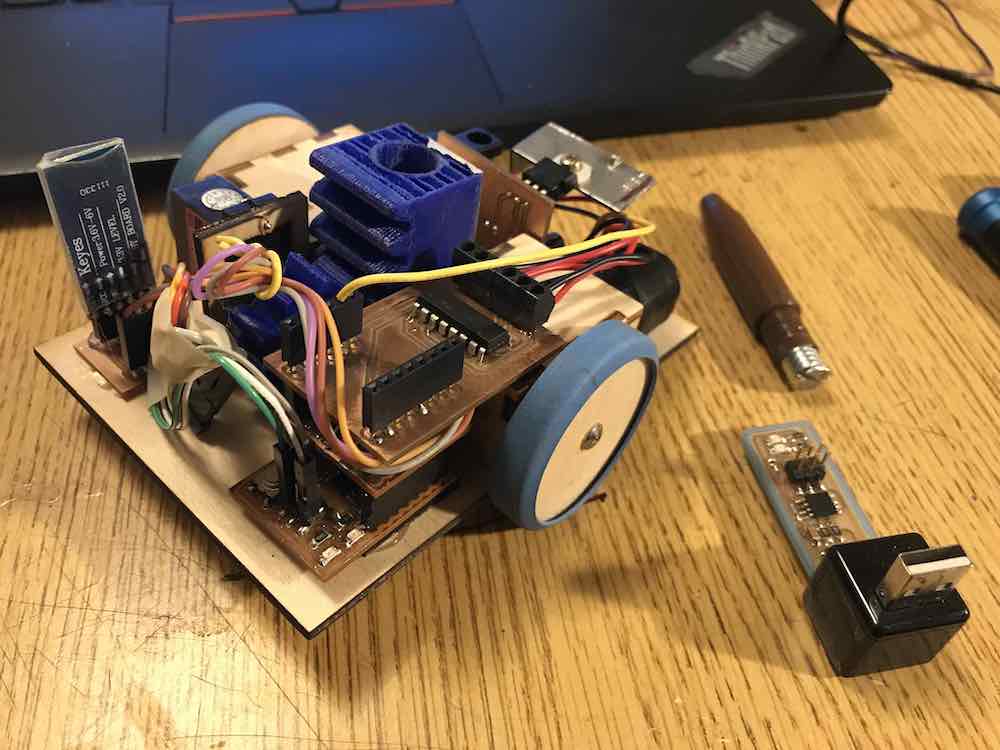
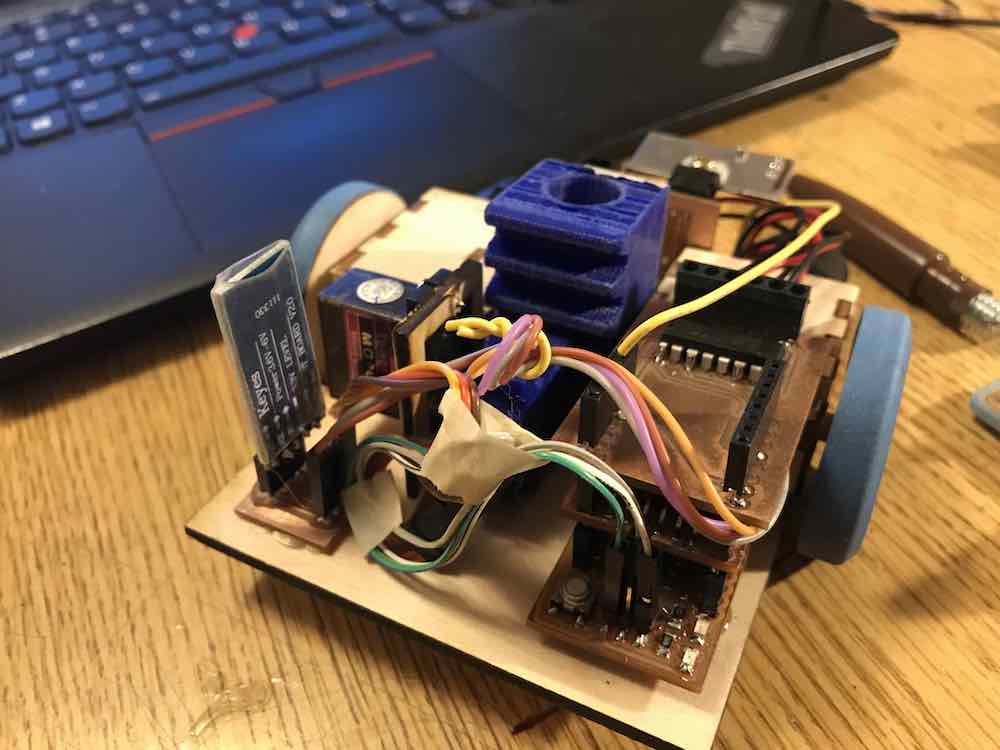
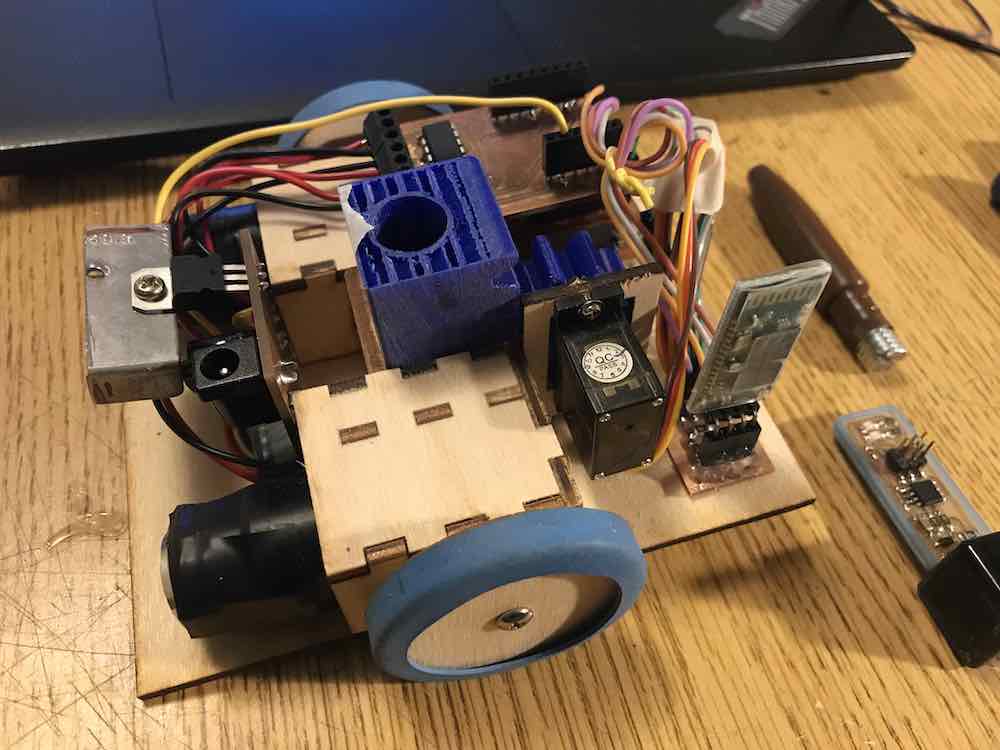
Box Turtle, a Final Project
class="pic">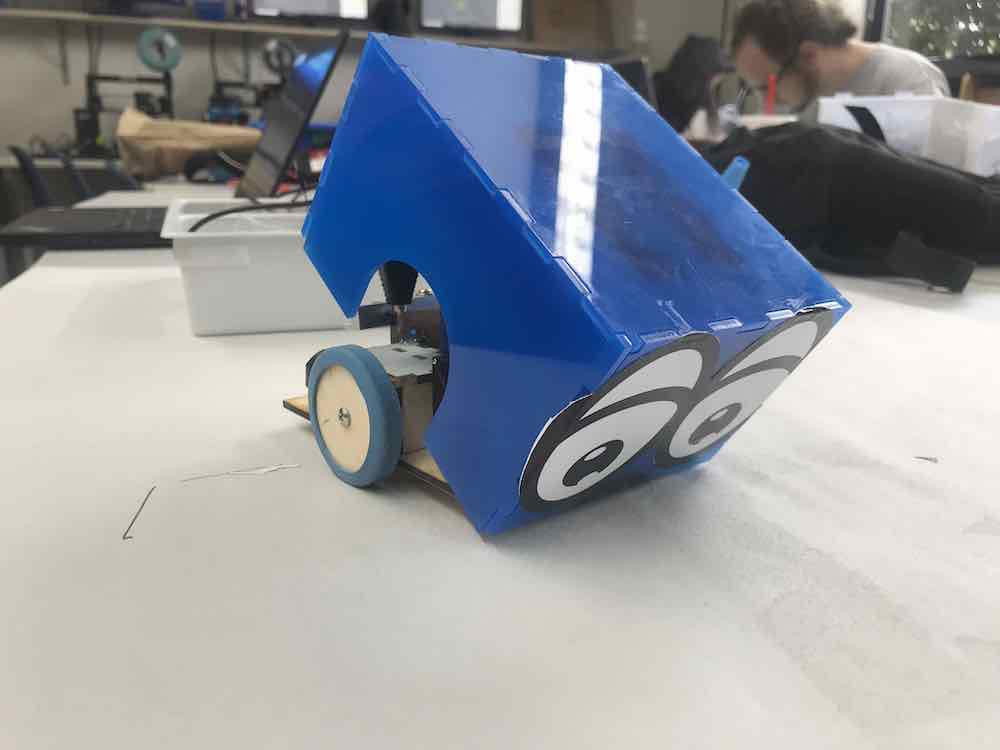
The Firmware
GENERAL COMMENTS/SETUP/MACROS:
/*
// Tiny44_Serial_H_Bridge_Controller.c
// Will Rudolph
// 2/29/19
//
//set lfuse to 0x5E for 20 MHz Xtal **(OxDE for no clock divide fuse)
//
// H-BRIDGE MOTOR DRIVER (2 motors, 2 pots) (for analog x-y motion..?)
// ALSO VERY BASIC SERIAL w/ FTDI ADAPTOR (TX/RX)
//
// ATTINY44 MCU
// TI L293DNE (45A27PM) H BRIDGE (not super beefy, should look for compatible replacements)
//
// 4 PWM PINS TO DRIVE H BRIDGE (these are all the hardware PWM pins on the Tiny44)
// PB2, PA7, PA6, PA5
// 2 ANALOG PINS FOR POTENTIOMETERS (any two pins on portA will work)
// PA2 & PA4
// 1 DIGITAL PIN FOR ENABLE (any unused pin could work (could break out EN1 and EN2, currently wired together))
// A3
// 2 DIGITAL PINS FOR TX/RX (Could (re)move, mainly for debug)(maybe implement bluetooth..)
// A0 & A1
// 2 PINS FOR OSCILLATOR (20Mhz)
// PB0 & PB1
// 1 PIN FOR RESET BUTTON (TECHNICALLY OPTIONAL, BUT WOULDN'T RECOMEND DISABLING)
// PB3 (active high, pull low to reset)
//
// based on...
// hello.ftdi.44.echo.c
// Neil Gershenfeld
// 12/8/10
//
// SERIAL COMMUNICATION INFO //--------------------------------------------------------------
// 115200 baud FTDI character send and receive, string send (no string receive, yet...)
// added functions** (pr_int(42) to print integers
// simplified printing w/ e.g.-> pr_ascii(10) pr_ascii('H') and pr_str("hello"))
//
//
// (c) Massachusetts Institute of Technology 2010
// This work may be reproduced, modified, distributed,
// performed, and displayed for any purpose. Copyright is
// retained and must be preserved. The work is provided
// as is; no warranty is provided, and users accept all
// liability.
//
*/
#define F_CPU 20000000UL
#include <avr/io.h>
#include <util/delay.h>
#include <avr/pgmspace.h>
#define output(directions,pin) (directions |= pin) // set port direction for output
#define set(port,pin) (port |= pin) // set port pin
#define clear(port,pin) (port &= (~pin)) // clear port pin
#define pin_test(pins,pin) (pins & pin) // test for port pin
#define bit_test(byte,bit) (byte & (1 bit)) // test for bit set
#define bit_delay_time 8.5 // bit delay for 115200 with overhead
#define bit_delay() _delay_us(bit_delay_time) // RS232 bit delay
#define half_bit_delay() _delay_us(bit_delay_time/2) // RS232 half bit delay
#define char_delay() _delay_ms(10) // char delay
#define serial_port PORTA
#define serial_direction DDRA
#define serial_pins PINA
#define serial_pin_in (1 << PA0) //tx on ftdi chip //PA0 (old value)
#define serial_pin_out (1 << PA1) //rx on ftdi chip //PA1 (old value)
#define max_buffer 25
#define off 255 //for motor control
Functions for Basic Serial Communication
void get_char(volatile unsigned char *pins, unsigned char pin, char *rxbyte) {
//
// read character into rxbyte on pins pin
// assumes line driver (inverts bits)
// eg //get_char(&serial_pins, serial_pin_in, &chr); //
//
*rxbyte = 0;
while (pin_test(*pins,pin))
//
// wait for start bit
//
;
//
// delay to middle of first data bit
//
half_bit_delay();
bit_delay();
//
// unrolled loop to read data bits
//
if pin_test(*pins,pin)
*rxbyte |= (1 << 0);
else
*rxbyte |= (0 << 0);
bit_delay();
if pin_test(*pins,pin)
*rxbyte |= (1 &l;t< 1);
else
*rxbyte |= (0 << 1);
bit_delay();
if pin_test(*pins,pin)
*rxbyte |= (1 << 2);
else
*rxbyte |= (0 << 2);
bit_delay();
if pin_test(*pins,pin)
*rxbyte |= (1 << 3);
else
*rxbyte |= (0 << 3);
bit_delay();
if pin_test(*pins,pin)
*rxbyte |= (1 << 4);
else
*rxbyte |= (0 << 4);
bit_delay();
if pin_test(*pins,pin)
*rxbyte |= (1 << 5);
else
*rxbyte |= (0 << 5);
bit_delay();
if pin_test(*pins,pin)
*rxbyte |= (1 << 6);
else
*rxbyte |= (0 << 6);
bit_delay();
if pin_test(*pins,pin)
*rxbyte |= (1 << 7);
else
*rxbyte |= (0 << 7);
//
// wait for stop bit
//
bit_delay();
half_bit_delay();
}
void put_char(volatile unsigned char *port, unsigned char pin, char txchar) {
//
// send character in txchar on port pin
// assumes line driver (inverts bits)
//
// start bit
//
clear(*port,pin);
bit_delay();
//
// unrolled loop to write data bits
//
if bit_test(txchar,0)
set(*port,pin);
else
clear(*port,pin);
bit_delay();
if bit_test(txchar,1)
set(*port,pin);
else
clear(*port,pin);
bit_delay();
if bit_test(txchar,2)
set(*port,pin);
else
clear(*port,pin);
bit_delay();
if bit_test(txchar,3)
set(*port,pin);
else
clear(*port,pin);
bit_delay();
if bit_test(txchar,4)
set(*port,pin);
else
clear(*port,pin);
bit_delay();
if bit_test(txchar,5)
set(*port,pin);
else
clear(*port,pin);
bit_delay();
if bit_test(txchar,6)
set(*port,pin);
else
clear(*port,pin);
bit_delay();
if bit_test(txchar,7)
set(*port,pin);
else
clear(*port,pin);
bit_delay();
//
// stop bit
//
set(*port,pin);
bit_delay();
//
// char delay
//
bit_delay();
}
void put_string(volatile unsigned char *port, unsigned char pin, char *str) {
//
// print a null-terminated string
//
static int index;
index = 0;
do {
put_char(port, pin, str[index]);
++index;
} while (str[index] != 0);
}
void pr_int(int n) {
if (n < 0) {
put_char(&serial_port, serial_pin_out, '-'); //putchar('-');
n = -n;
}
if (n / 10 != 0)
pr_int(n / 10);
put_char(&serial_port, serial_pin_out, (n%10) + '0'); //putchar((n % 10) + '0');
}
void pr_ascii(char n)
{
put_char(&serial_port, serial_pin_out, n); //new line is 10, good one
}
void pr_str(char *string)
{
put_string(&serial_port, serial_pin_out, string);
}
ADC Read and PWM Write Functions
long read_ADC2() //reads ADC attached to PA5 and returns a long, 0-1023
{
uint16_t a,a_0;
ADCSRA |= (1 <<ADPS0) | (1 << ADPS1) | (1 << ADPS2) | (1 << ADEN) | (1<<ADSC); //set ADC prescale to 1/128, enable, and start conversion
ADMUX |= (1<<MUX1); //select PA3 as analog input
ADMUX &= ~(1<<REFS0) & ~(1<<REFS1) & ~(1<<MUX0) & ~(1<<MUX2) & ~(1<<MUX3) & ~(1<<MUX4) & ~(1<<MUX5); // VCC as reference, single ended input
DIDR0 |= (1<<ADC3D); //disable digital input for PA3
a = ADCL; //read lower byte of ADC
a_0 = ADCH; //read upper byte of ADC (really just 2 bits)
return a + (a_0<<8); //return lower byte plus upper 2 bits shifted 8 left (which is just the original 10-bit number)
}
long read_ADC4() //reads ADC attached to PA5 and returns a long, 0-1023
{
uint16_t a,a_0;
ADCSRA |= (1 << ADPS0) | (1 << ADPS1) | (1 << ADPS2) | (1 << ADEN) | (1<<ADSC); //set ADC prescale to 1/128, enable, and start conversion
ADMUX |= (1<<MUX2); //select PA5 as analog input
ADMUX &= ~(1<<REFS0) & ~(1<<REFS1) & ~(1<<MUX0) & ~(1<<M;UX1) & ~(1<<MUX3) & ~(1<<MUX4) & ~(1<<MUX5); // VCC as reference, single ended input
DIDR0 |= (1<<ADC5D); //disable digital input for PA5
a = ADCL; //read lower byte of ADC
a_0 = ADCH; //read upper byte of ADC (really just 2 bits)
return a + (a_0<<8); //return lower byte plus upper 2 bits shifted 8 left (which is just the original 10-bit number)
}
long map(long x, long in_min, long in_max, long out_min, long out_max) //value map function (from Arduino)
{
return (x - in_min) * (out_max - out_min) / (in_max - in_min) + out_min;
}
void pwm_init_OC0()
{
//pwm init -- remember to enable DDRx for PA7 or PB2
TCCR0A |= (1<<COM0A1) | (1<<COM0B1) | (1<<WGM00); //; //phase correct pwm, OC0A(PB2) and OC0B(PA7) add (1<<COM0B0) | (1<<COM0A0) to invert
TCCR0B |= (1<<CS00); //no clock prescaling (1<<CS01) | (1<<CS02)
//
}
void pwm_init_OC1()
{
//pwm init -- remember to enable DDRA for PA5 and/or PA6
TCCR1A |= (1<<COM1A1) | (1<<COM1B1) | (1<<WGM10);//phase correct pwm 8 bit
//| (1<<COM1A0) | (1<<COM1B0)?? turn COM bits off to put pin back to normal operation
TCCR1B |= (1<<CS10); //no clock prescaler
}
void pa5_pwm_write(uint8_t val)
{
OCR1BL = val;
}
void pa6_pwm_write(uint8_t val)
{
OCR1AL = val;
}
void pa7_pwm_write(uint8_t val)
{
OCR0B = val;
}
void pb2_pwm_write(uint8_t val)
{
OCR0A = val;
}
Movement Functions
void sec_delay(int sec)
{
while(sec--)
{
_delay_ms(1);
}
}
void forward(uint8_t spd, float duration)
{
//drive motor 1 & 2 //CCW
DDRB &= ~(1<<DDB2); //LEFT MOTOR
DDRA &= ~(1<<D;DA6); //disable port that isn't driving H-Bridge
DDRA |= (1<<DDA7);
DDRA |= (1<<DDA5); //enable port that is driving
PORTA |= (1<<PA3); //make sure enable is HIGH
pa7_pwm_write(spd);
pa5_pwm_write(spd-30);
sec_delay(duration);
pa7_pwm_write(off);
pa5_pwm_write(off);
}
void backward(uint8_t spd, float duration)
{
DDRA &= ~(1<<DDA7); //LEFT MOTOR
DDRA &= ~(1<<DDA5); //same as above but for one thing, see below
DDRB |= (1<<DDB2);
DDRA |= (1<<DDA6);
PORTA |= (1<<PA3);
pb2_pwm_write(spd);
pa6_pwm_write(spd-30);
sec_delay(duration);
pb2_pwm_write(off);
pa6_pwm_write(off);
}
void left(uint8_t spd, float duration)
{
DDRA &= ~(1<<DDA7);
DDRA &= ~(1<<DDA6);
DDRB |= (1<<DDB2);
DDRA |= (1<<DDA5);
PORTA |= (1<<PA3);
pb2_pwm_write(spd);
pa5_pwm_write(spd-30);
sec_delay(duration);
pb2_pwm_write(off);
pa5_pwm_write(off);
}
void right(uint8_t spd, float duration)
{
DDRB &= ~(1<<DDB2);
DDRA &= ~(1<<DDA5);
DDRA |= (1<<DDA7);
DDRA |= (1<<DDA6);
PORTA |= (1<<PA3);
pa7_pwm_write(spd);
pa6_pwm_write(spd-30);
sec_delay(duration);
pa7_pwm_write(off);
pa6_pwm_write(off);
}
void servo_init()
{
DDRA |= (1<<DDA4); //enable servo signal pin
PORTA |= (1<<PA4); //send two pulses to set initial position
_delay_us(1300);
PORTA &= ~(1<<PA4);
_delay_ms(1);
PORTA |= (1<<PA4);
_delay_us(1300);
PORTA &= ~(1<<PA4);
}
void servo_up()
{
PORTA |= (1<<PA4);
_delay_us(1300);
PORTA &= ~(1<<PA4);
_delay_ms(1);
PORTA |= (1<<PA4);
_delay_us(1300);
PORTA &= ~(1<<PA4);
}
void servo_down()
{
PORTA |= (1<<PA4);
_delay_us(1000);
PORTA &= ~(1<<PA4);
_delay_ms(1);
PORTA |= (1<<PA4);
_delay_us(1000);
PORTA &= ~(1<<PA4);
}
void run(uint8_t f_speed, float f_dur, uint8_t t_speed, float t_dur)
{
char character;
get_char(&serial_pins, serial_pin_in, &character);
if (character == 'w')
{
forward(f_speed,f_dur);
}
else if (character == 's')
{
backward(f_speed,f_dur);
}
else if (character == 'a')
{
left(t_speed,t_dur);
}
else if (character == 'd')
{
right(t_speed,t_dur);
}
else if (character == 'p')
{
servo_up();
}
else if (character == 'l')
{
servo_down();
}
else if (character == 'x')
{
PORTA &= ~(1<<PA3); //disable motor driver to prevent overheating
}
PORTA &= ~(1<<PA3); //disable motor driver to prevent overheating
}
The Main Function
int main(void) { //Setup Code
// initialize necessary variables
uint8_t fwd_speed, turn_speed;
int fwd_dur, turn_dur;
// initialize output pins //output is normally pulled high (pulled low to send data)
set(serial_port, serial_pin_out); //same as PORTA |= (1<<PA1)
output(serial_direction, serial_pin_out); //same as DDRA |= (1<<PA1)
// set PWM pins as output
DDRA |= (1<<DDA5) | (1<<DDA6) | (1<<DDA7);
DDRB |= (1<<DDB2);
pwm_init_OC0(); //initialize timer/counter0 (PB2 & PA7)
pwm_init_OC1(); //initialize timer/counter1 (PA6 & PA5)
//Start with motors disabled
DDRA |= (1<<DDA3); //Set motor enable pin to output
PORTA &= ~(1<<DDA3); //Pull low (motors disabled)
//Initialize Speed and Duration Variables
//Tweak these to change movement characteristics
fwd_dur = 10; //now in ms//one decimal precision (change delay ms to 10 in delay function to give 2 places of precision)
fwd_speed = 200; //(255-0, 255 off, 0 on)
turn_dur = 10;
turn_speed = 200;
//Initialize Servo
servo_init();
servo_up();
while (1) { //Looping Function
// w, a, s, d used for fwd, left, back, right respectively
run(fwd_speed,fwd_dur,turn_speed,turn_dur);
}
}
Interface Code
The Processing Application Code
/**
* Keyboard Turtle Control
*
**/
import processing.serial.*;
Serial myPort; // Create object from Serial class
int val; // Data received from the serial port
void setup()
{
size(500, 500);
// I know that the first port in the serial list on my mac
// is always my FTDI adaptor, so I open Serial.list()[0].
// On Windows machines, this generally opens COM1.
// Open whatever port is the one you're using.
String portName = "COM26";
myPort = new Serial(this, portName, 115200);
}
void draw() {
// keep draw() here to continue looping while waiting for keys
}
void keyPressed() {
if (key == 'w') {
myPort.write('w');
}
else if (key == 'a') {
myPort.write('a');
}
else if (key == 'd') {
myPort.write('d');
}
else if (key == 's') {
myPort.write('s');
}
else{
myPort.write('x');
}
}
Powershell Script to Send a Controlled Character Stream
PS C: $turt = New-Object System.IO.Ports.SerialPort COM35, 115200, None, 8, one
PS C: $turt.open()
PS C: Get-Content C:\Users\will.rudolph\Documents\txt_files\txt_test.txt -Encoding Byte | foreach { $turt.write([char]$_); Start-Sleep -Milliseconds 5 }
Python Program to Generate Character Stream
char_list = []
def fwd(len):
for i in range(10*len):
char_list.append('s')
def rev(len):
for i in range(10*len):
char_list.append('w')
def left(len):
for i in range(10*len):
char_list.append('a')
def right(len):
for i in range(10*len):
char_list.append('d')
def triangle():
fwd(3)
right(100)
fwd(3)
right(100)
fwd(3)
for i in range(5):
triangle()
right(60)
print(''.join(char_list))
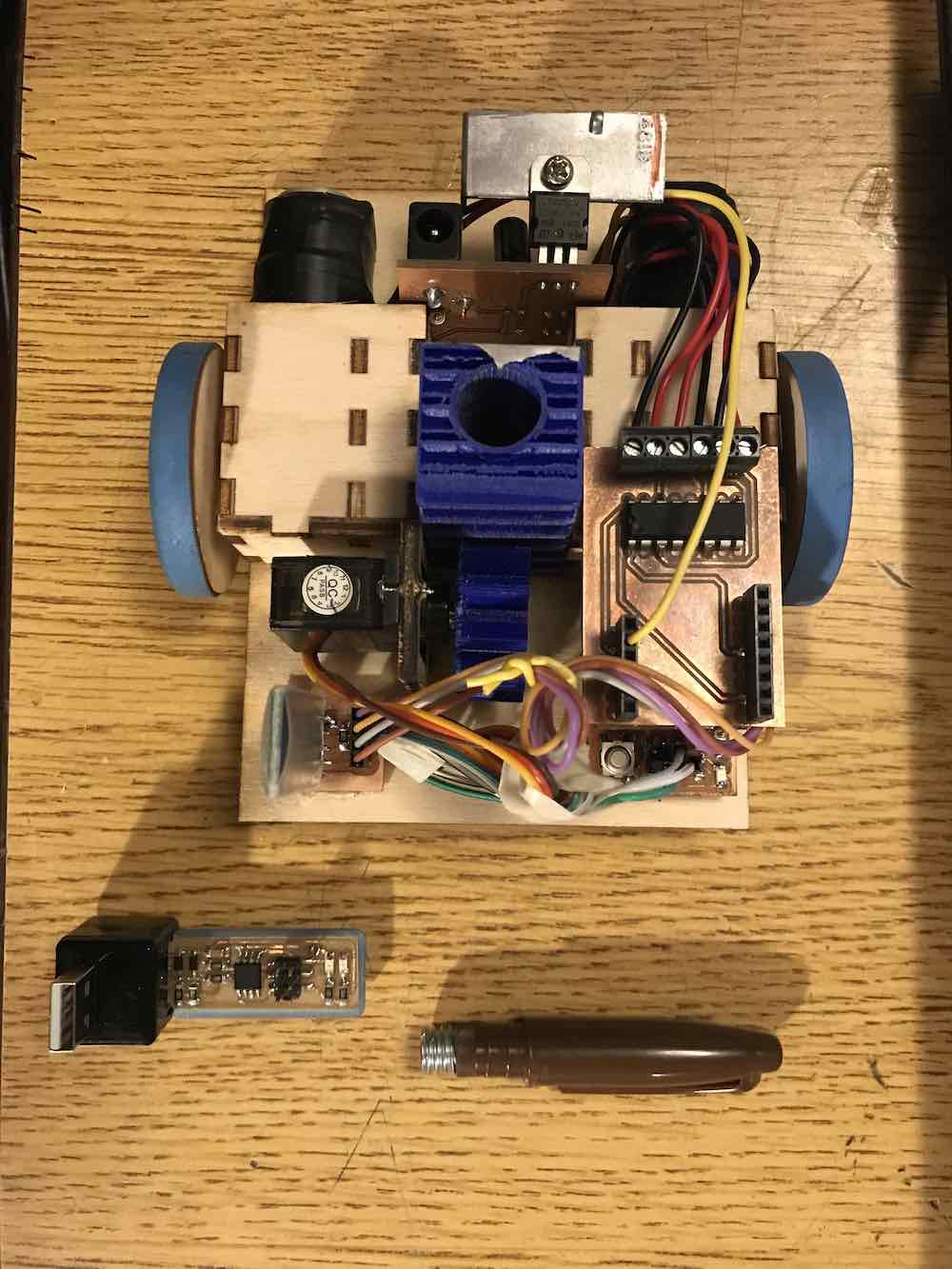
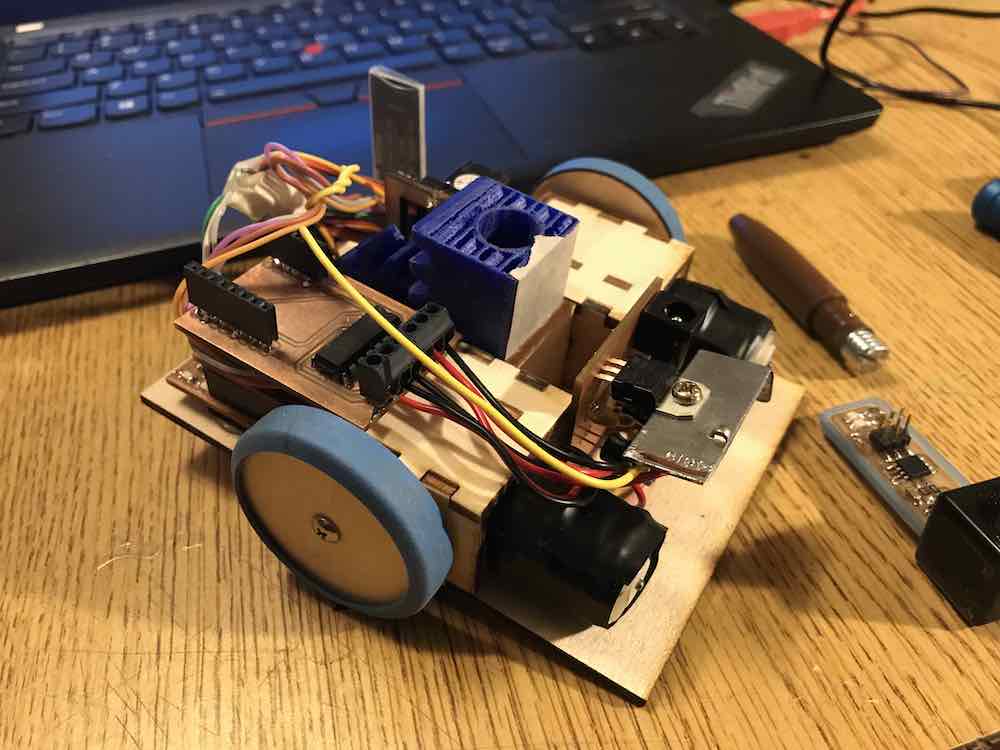
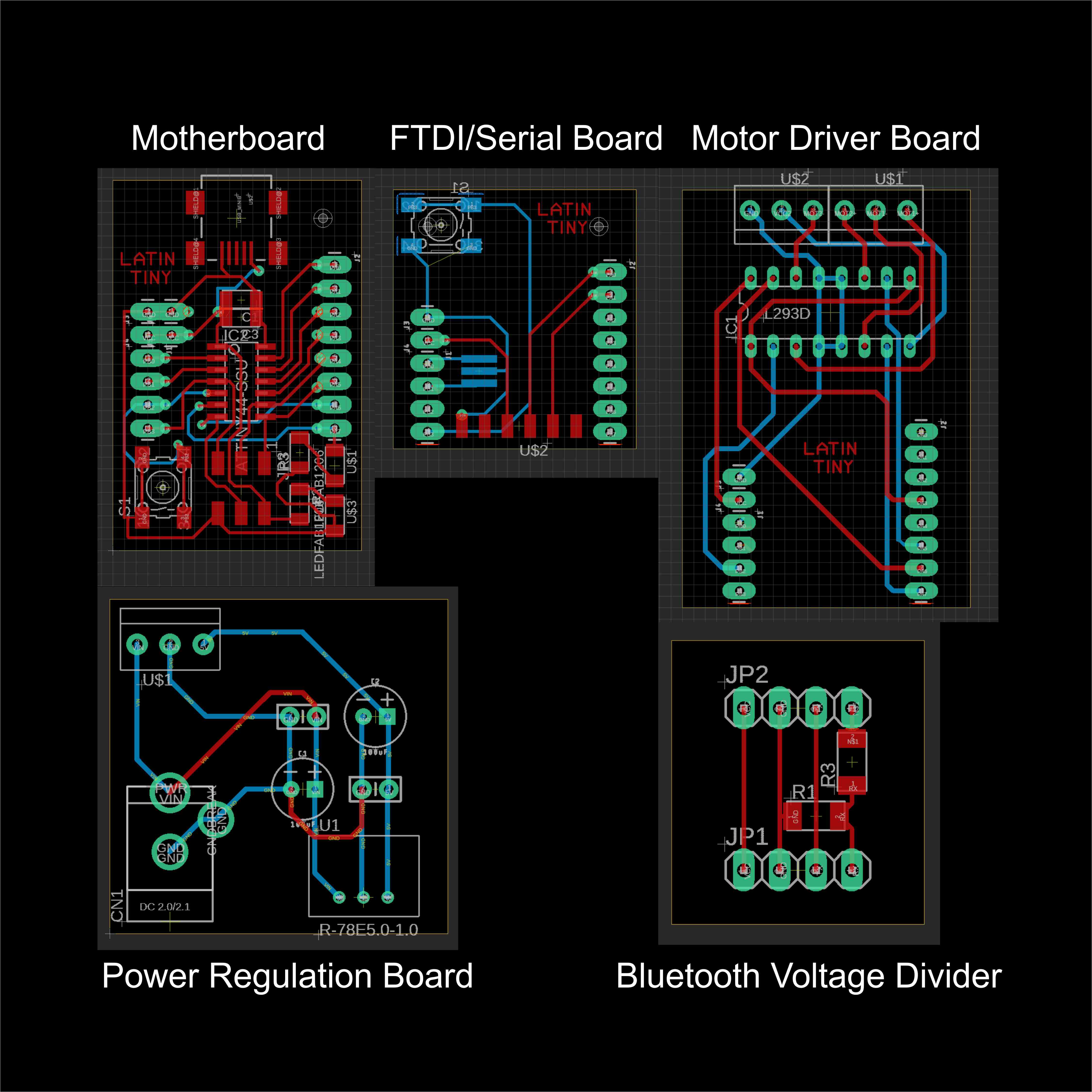
Circuit Board Designs
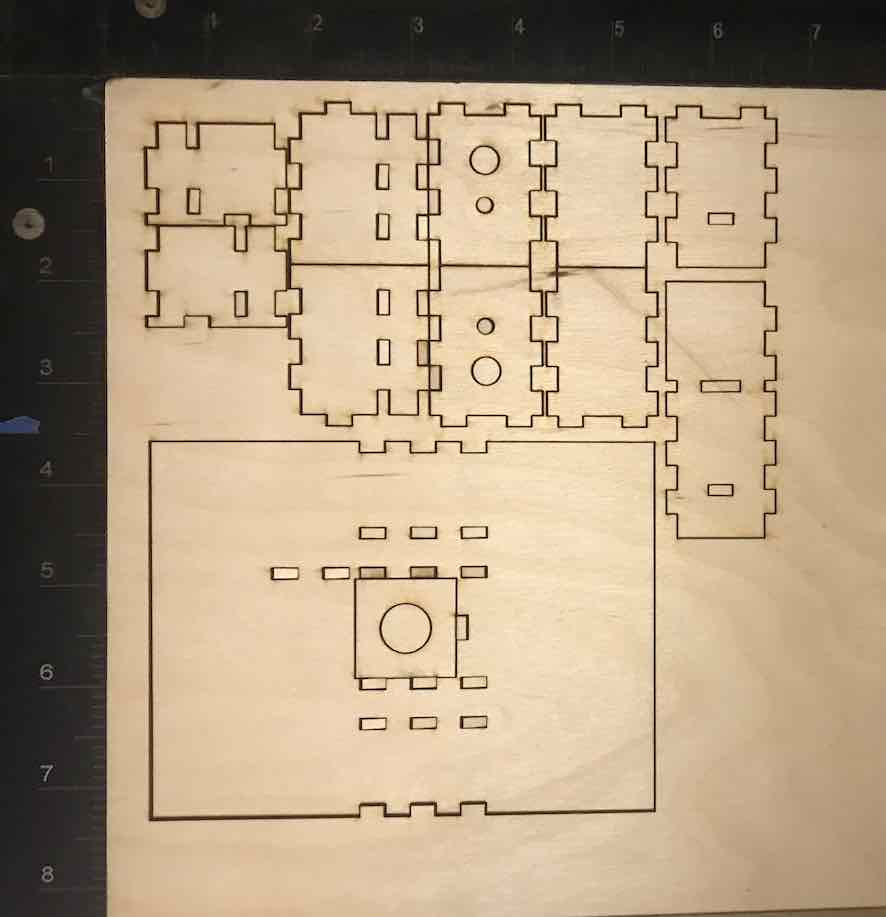
Chassis Design