TITLE:AMCAP(Alternative Method for Construction by abjecting P lastics¶
Overview¶
The project mainly focuses on the technique to eradicate the pollution caused by waste plastics upto possible level by converting it into a resoursabel product for the construction of building through digital fabrication
Goals¶
To reduce the pollution caused by waste plastic ,thereby maintain a sustained and eco friendly nature Reduce the cost and time for the construction of floorings and buildings
Research Specifications¶
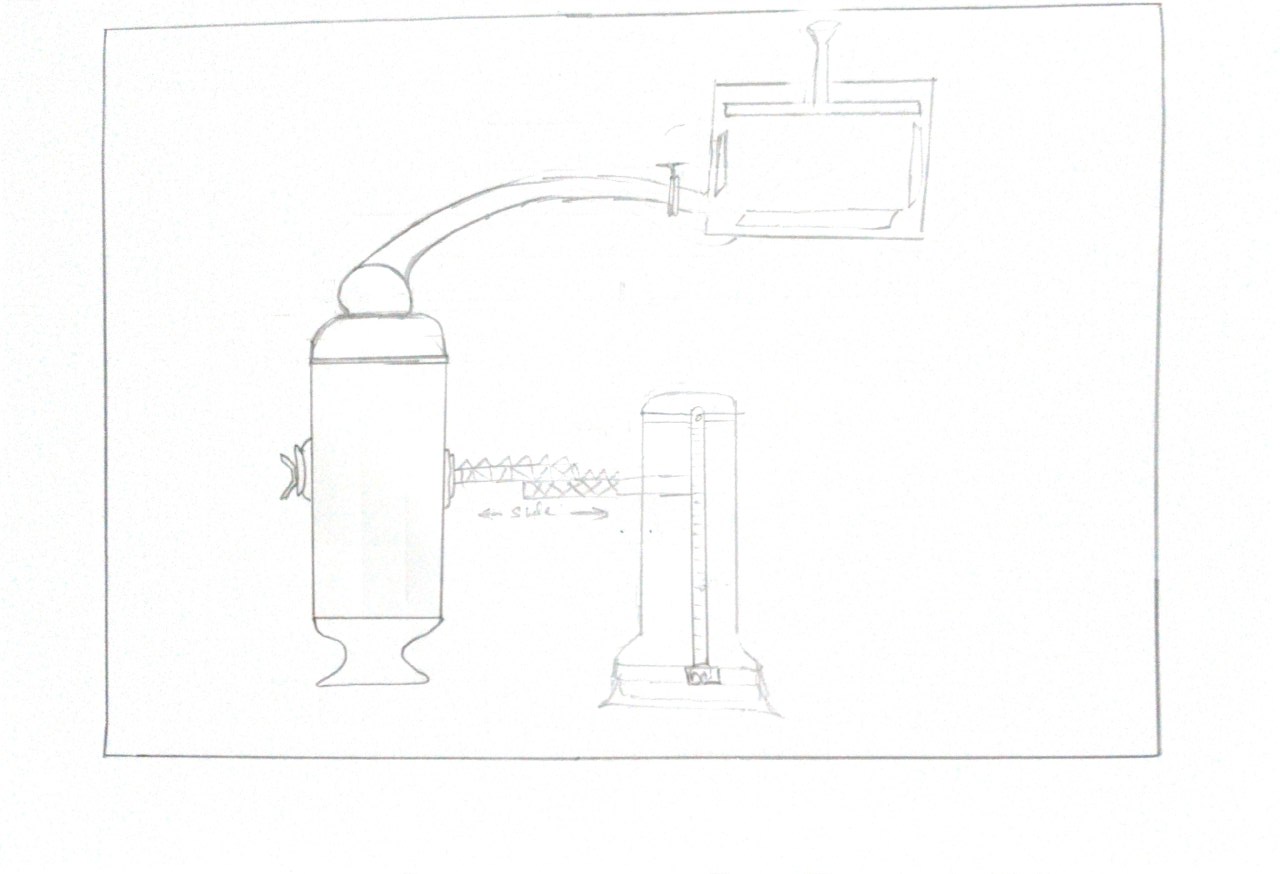
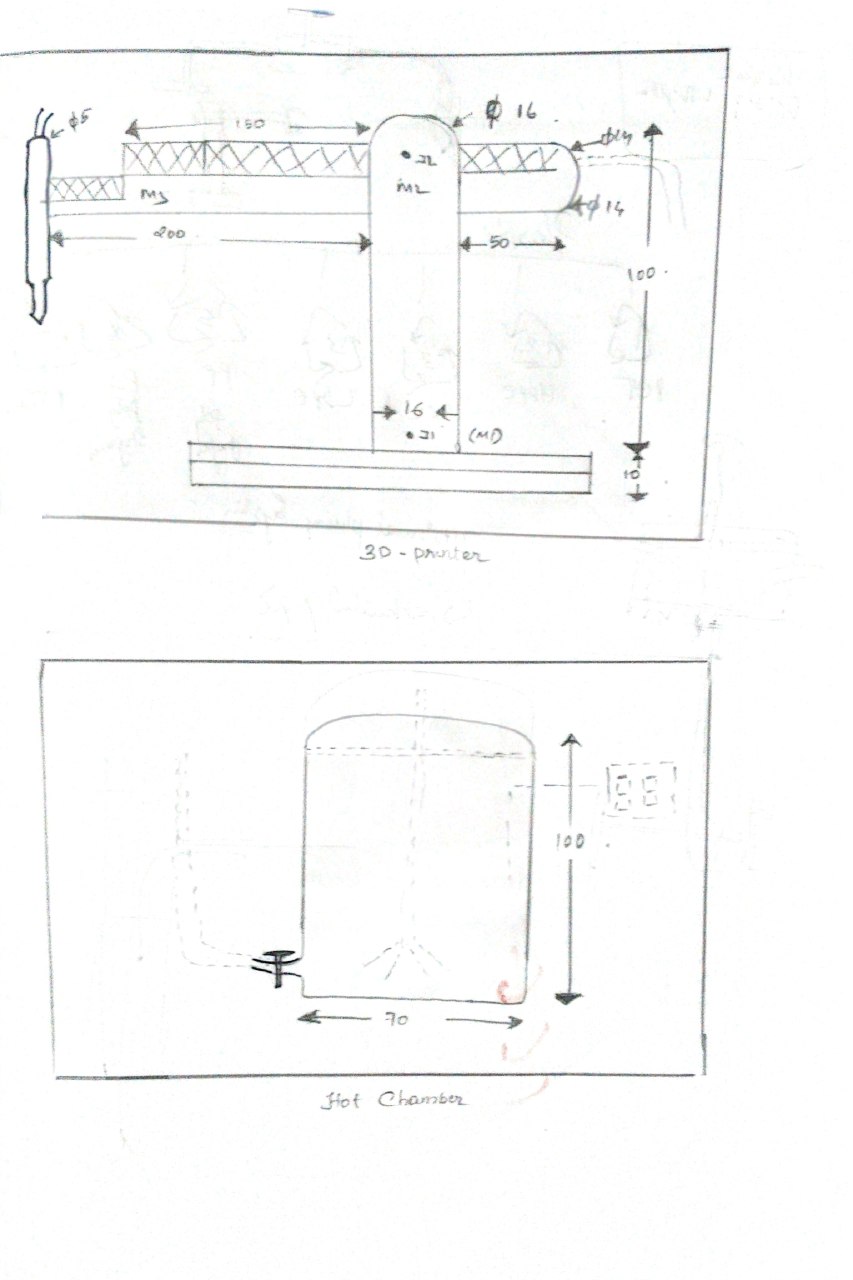
1.AMCAP basically consist of 2 parts.
(i)Mixing chamber.
(ii) Extruding part.
(i) The mixing part provides a chamber which mixes the sand and plastics using a stirrer and maintaining a temperature between 400-500 degrees to melt the mixture.
(ii) Extruding part consist of metal pipe which is made up of HS303 which Can Withstand Upto 700 Degrees (https://www.azom.com/article.aspx?ArticleID=964) with an extruder.
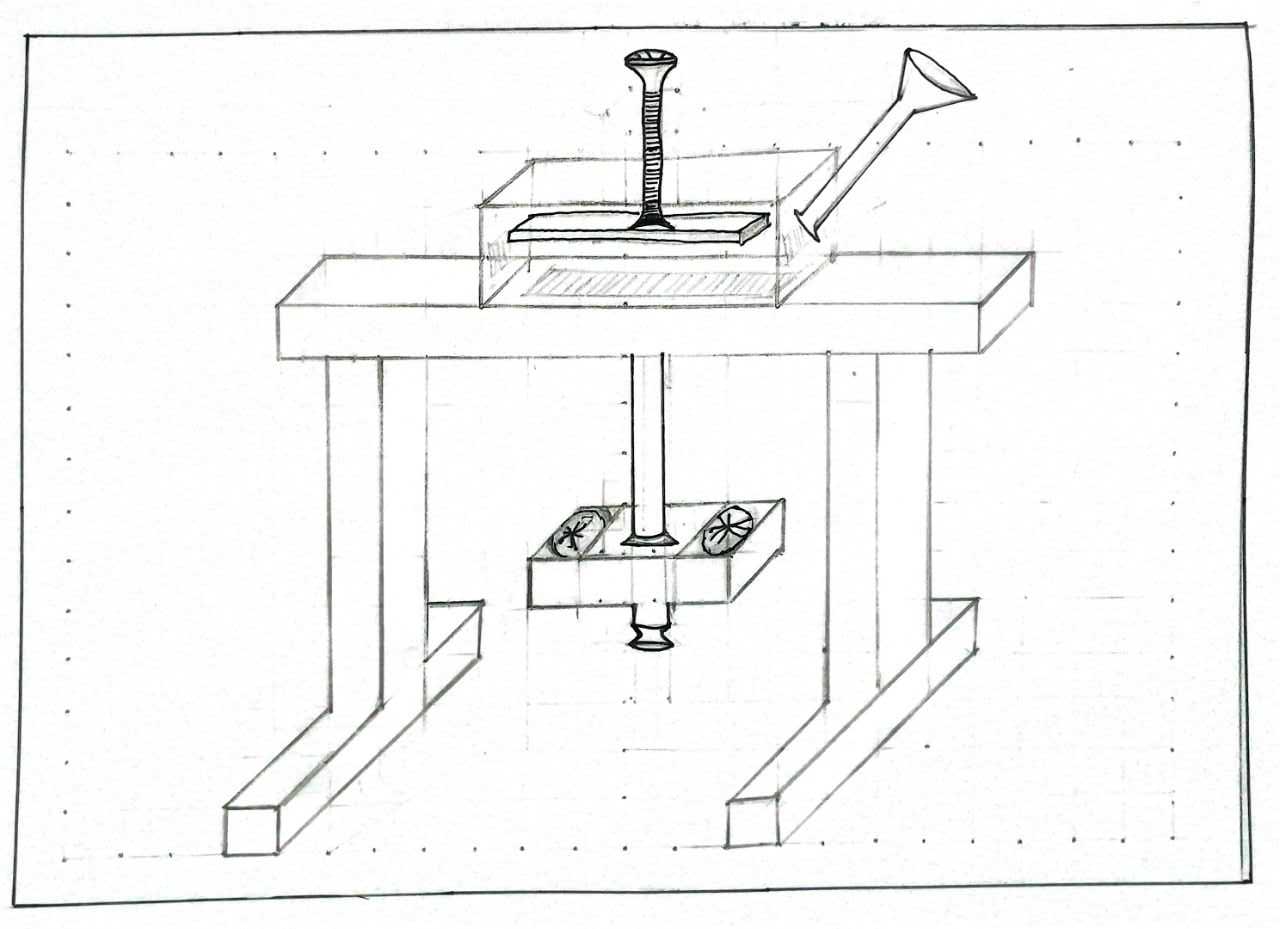
2. AMCAP is based on XYZ Coordinate positioning with a lead joint that can perform 360 degrees.
3. The ink used for production is a mixture of sand and plastic which is melted within 450 degrees.
Useful links¶
[https://www.youtube.com/watch?v=nH-zpnoNLEU&t=127s].
[https://www.youtube.com/watch?v=wCzS2FZoB-I].
Estimated Designs¶
 “
“
Estimated Errors¶
1.The errors with the selection of materials used should be withstand higher temperatures. 2.The errors constrained with size. 3.The programming errors. 4.SAfety issues etc.
Cost Estimated¶
The estimated cost will be around 6000rs (around 85 $)
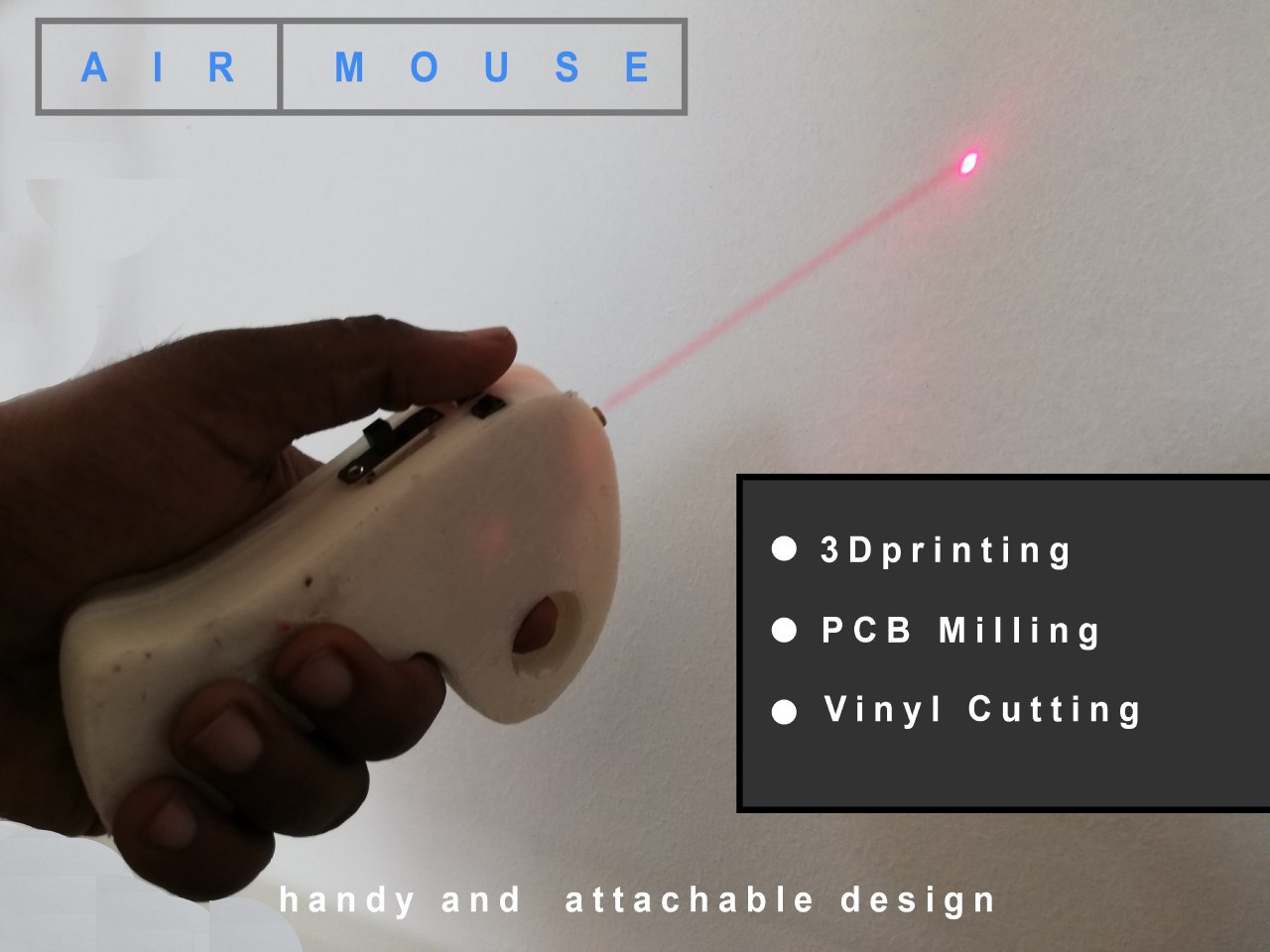
MY SECOND IDEA WAS TO MAKE AN AIR MOUSE¶
my second idea was to make an air mouse which have no contact to the surface witha the added advantage of a laser pointer.
For that my plan is to make an xy direction mapping using a gyro and accelerometer and to make a serial uart communication with bluetooth to PC.
The challenge was to make it HID .
FABRICATION TECHNIQUES FOLLOWED¶
Basically the mouse conatins 5 parts
1.Electronics designing
2.Electronics production
3.Programming
4.Networking
5.3d Designing
6.3d Printing.
Components Used¶
1.Copper board
2.Atmega 328 p
3.MPU 6050
4.HC05 Bluetooth
5.Resistors of 10k(4 nos)
6.Resistors of 1 k(2nos)
7.0 ohm resistors (3nos)
8.Resonator of 20 mgz
9.Capacitor of 1uf
10.Slide swithc (2nos)
11.Push Button (2 nos)
12.Jumper wires
13.Avirsp pin headder(2*3)
14.FTDI pin headder (1*6)
15.LIPO battery
16.FT4060 Charging module
Through the making¶
1.Electronics designing¶
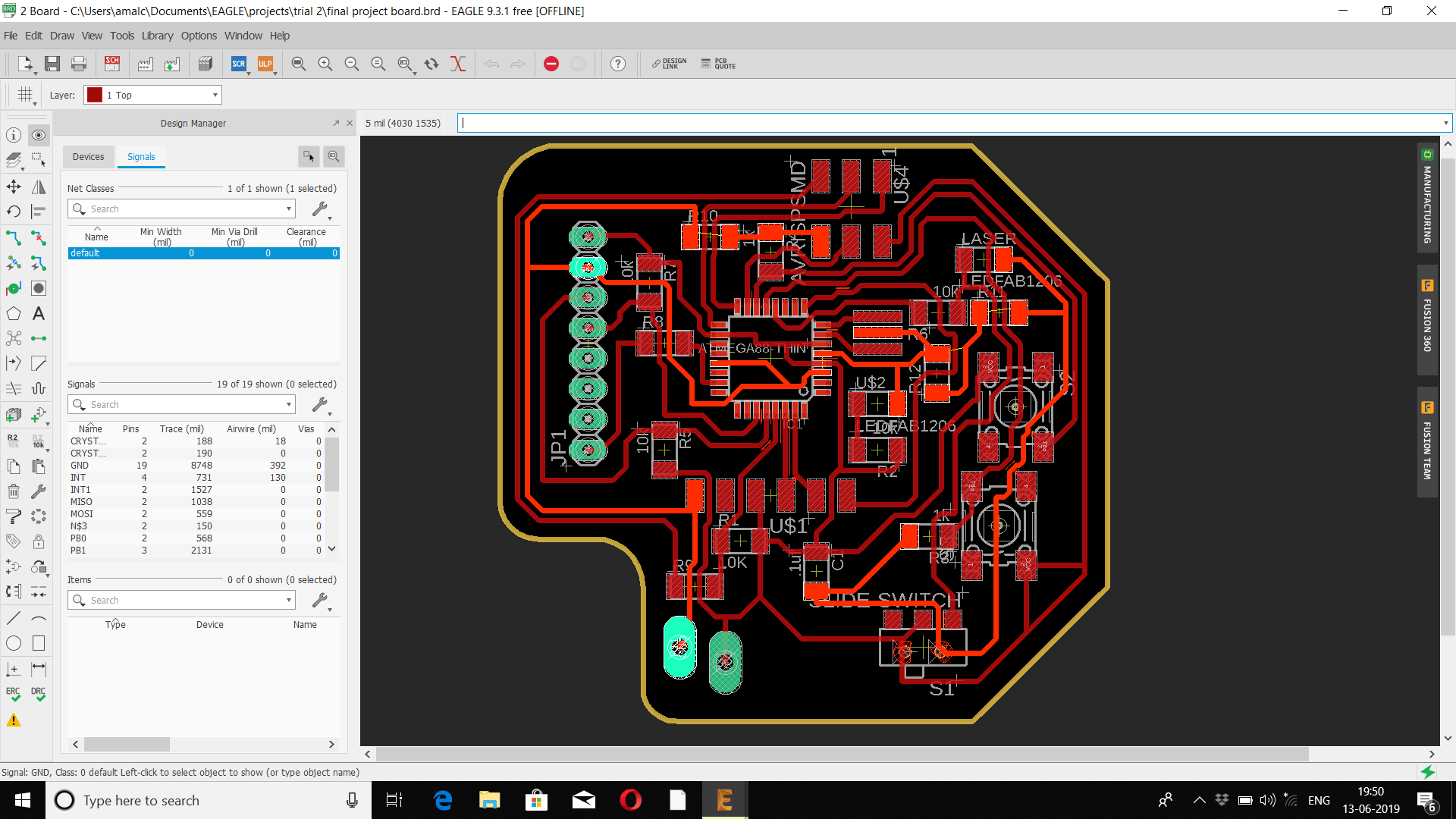
With the knowledge gained from the assignments I worked on AUTODESK EAGLE for the purpose of board designing.
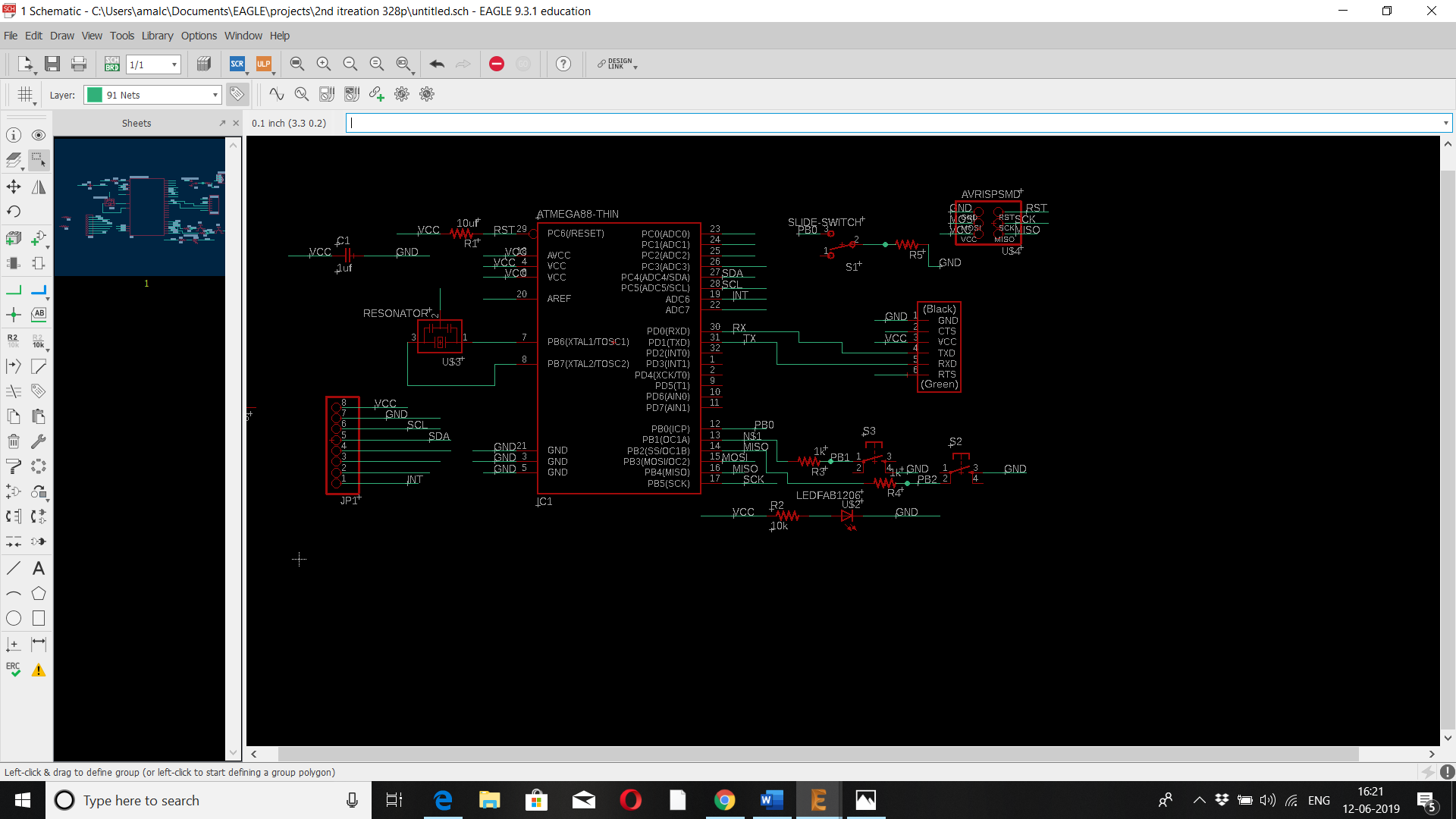 My basic idea was to make two boards .The first board will sense the x,y motion using mpu 6050 ,process by using atmega 328p and then transmit the signal through HC05 module to a HID enabled board.
My basic idea was to make two boards .The first board will sense the x,y motion using mpu 6050 ,process by using atmega 328p and then transmit the signal through HC05 module to a HID enabled board.
My plan was to make a Human Interface device with 32u4
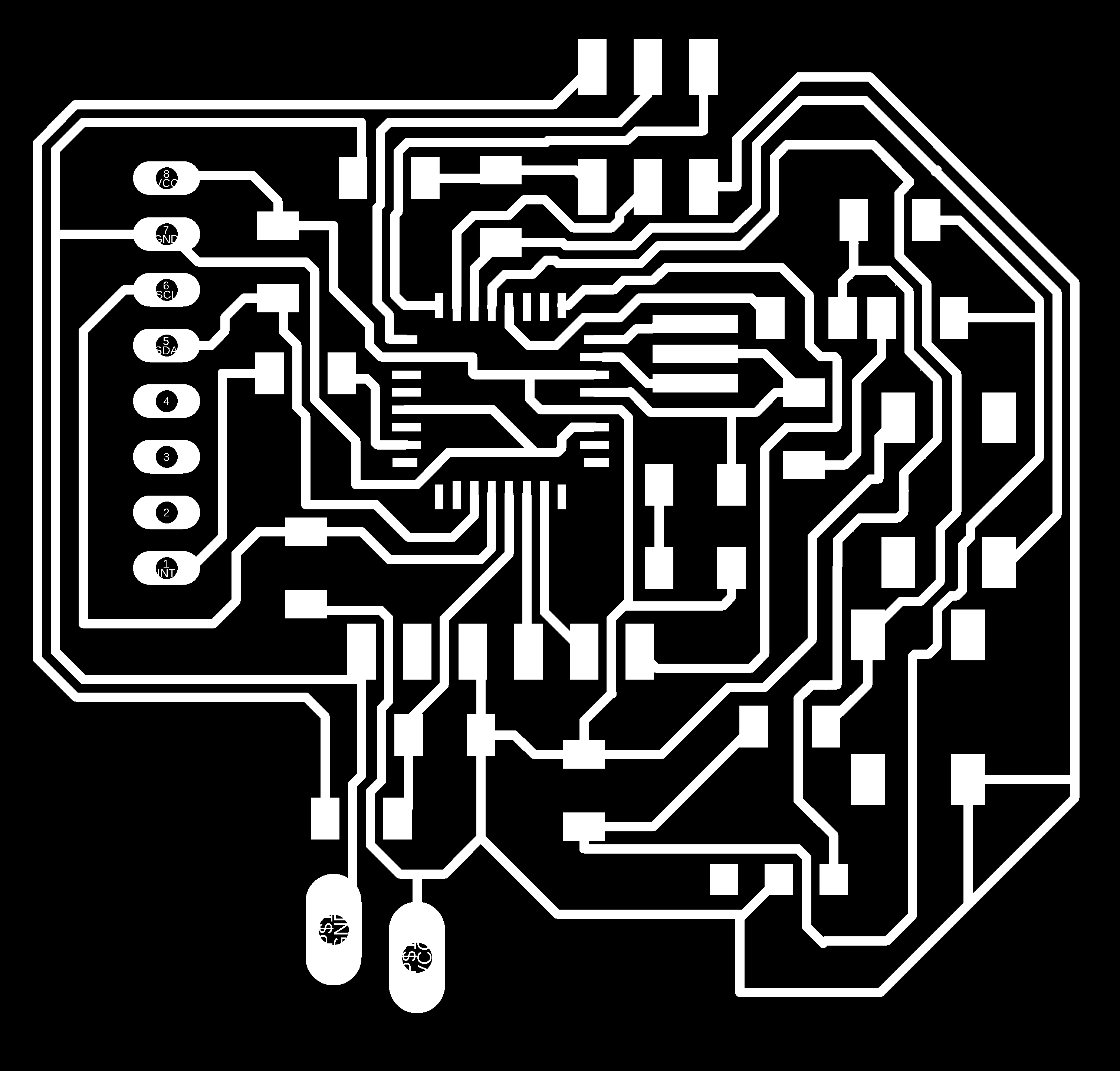
 So while I was working with 32u4 mcu , the milling was a failure because the traces left unmilled and it is understood that the existing library doesn’t meets 16 mil.
So while I was working with 32u4 mcu , the milling was a failure because the traces left unmilled and it is understood that the existing library doesn’t meets 16 mil.
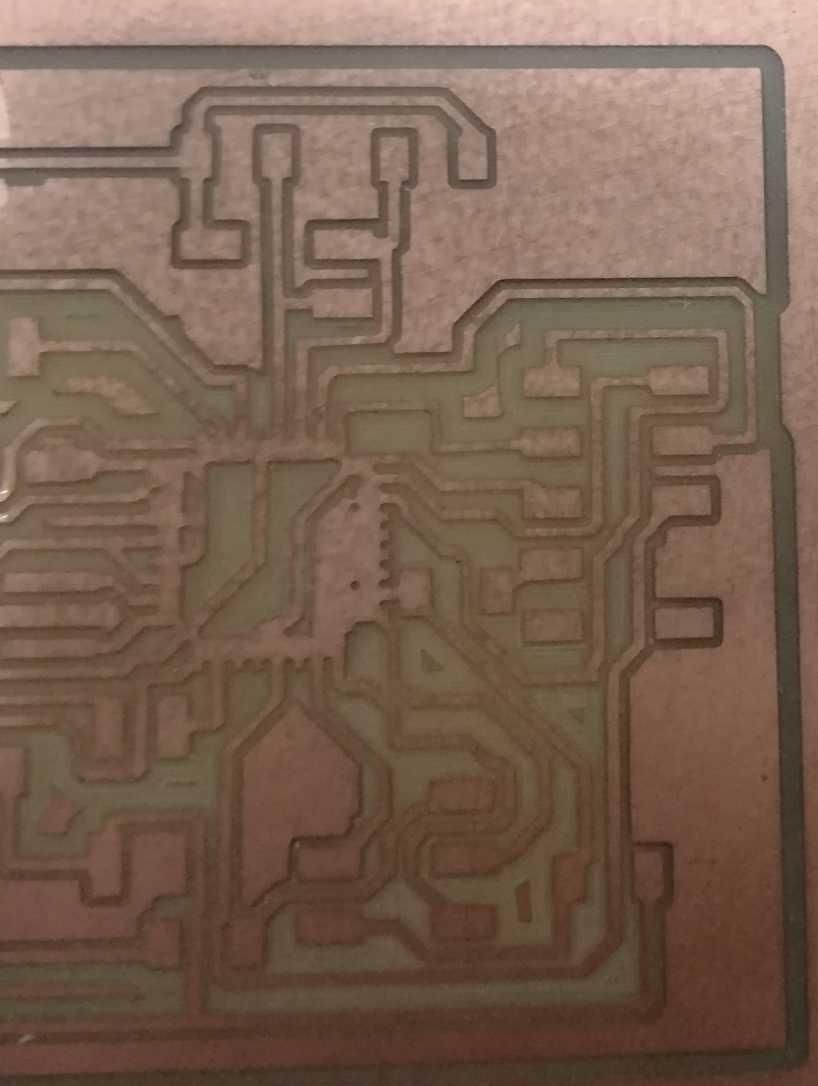 So I planned to edit the traces in Adobe Photoshop and milled .But this time the traces were much thin and too hard for soldering.
So I planned to edit the traces in Adobe Photoshop and milled .But this time the traces were much thin and too hard for soldering.
2.Electronics production¶
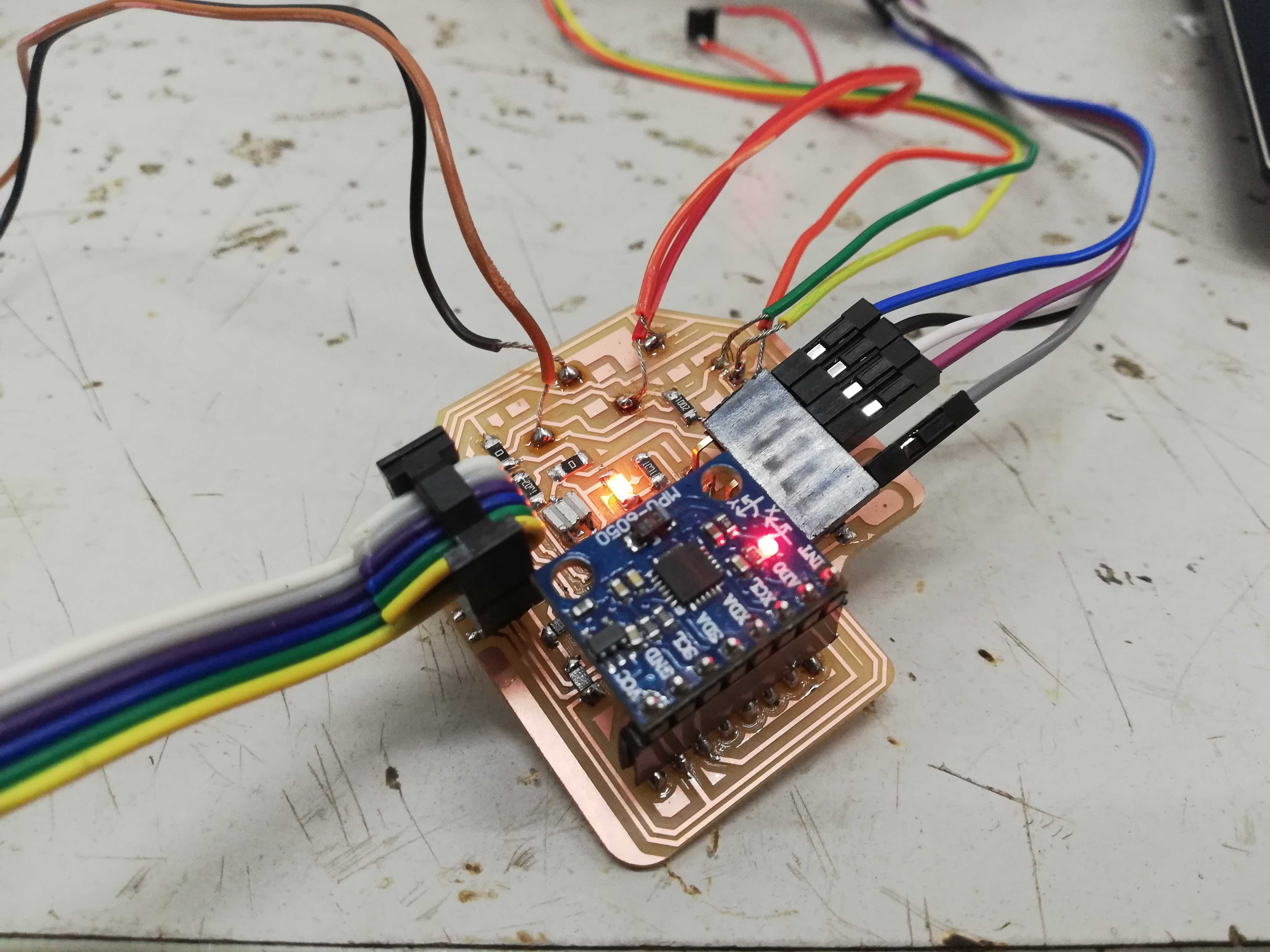
Even though I designed a board using atmega328 enabling a serial output by hc05 to transmit the serial data and to sense the XY directions using 6050mp which comprises about gyro and accelerometer.
The First design was too large to make it wearable design and made it as a first iteration of board.
So I redesigned to make it compact and achieved it to my best.
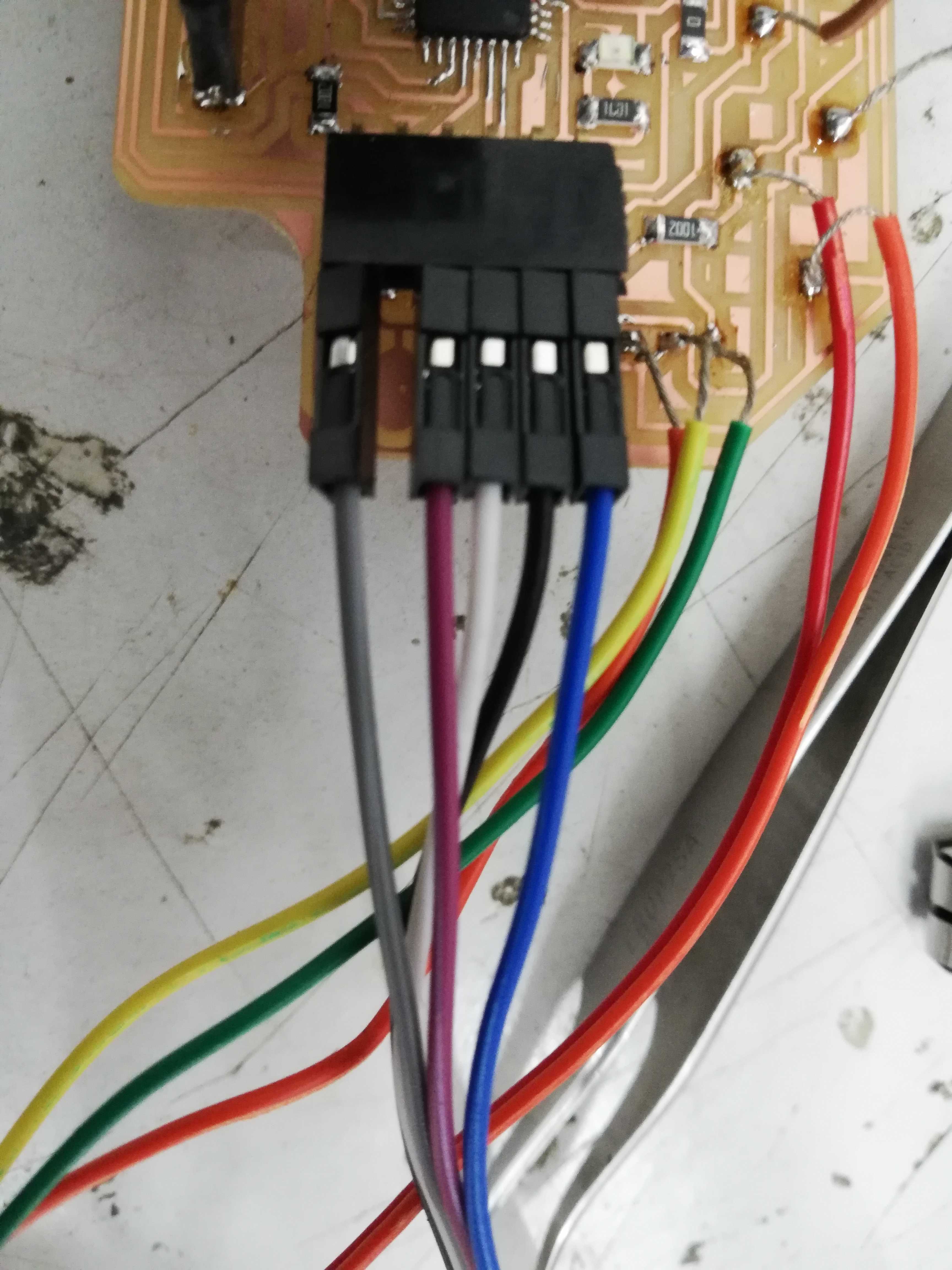
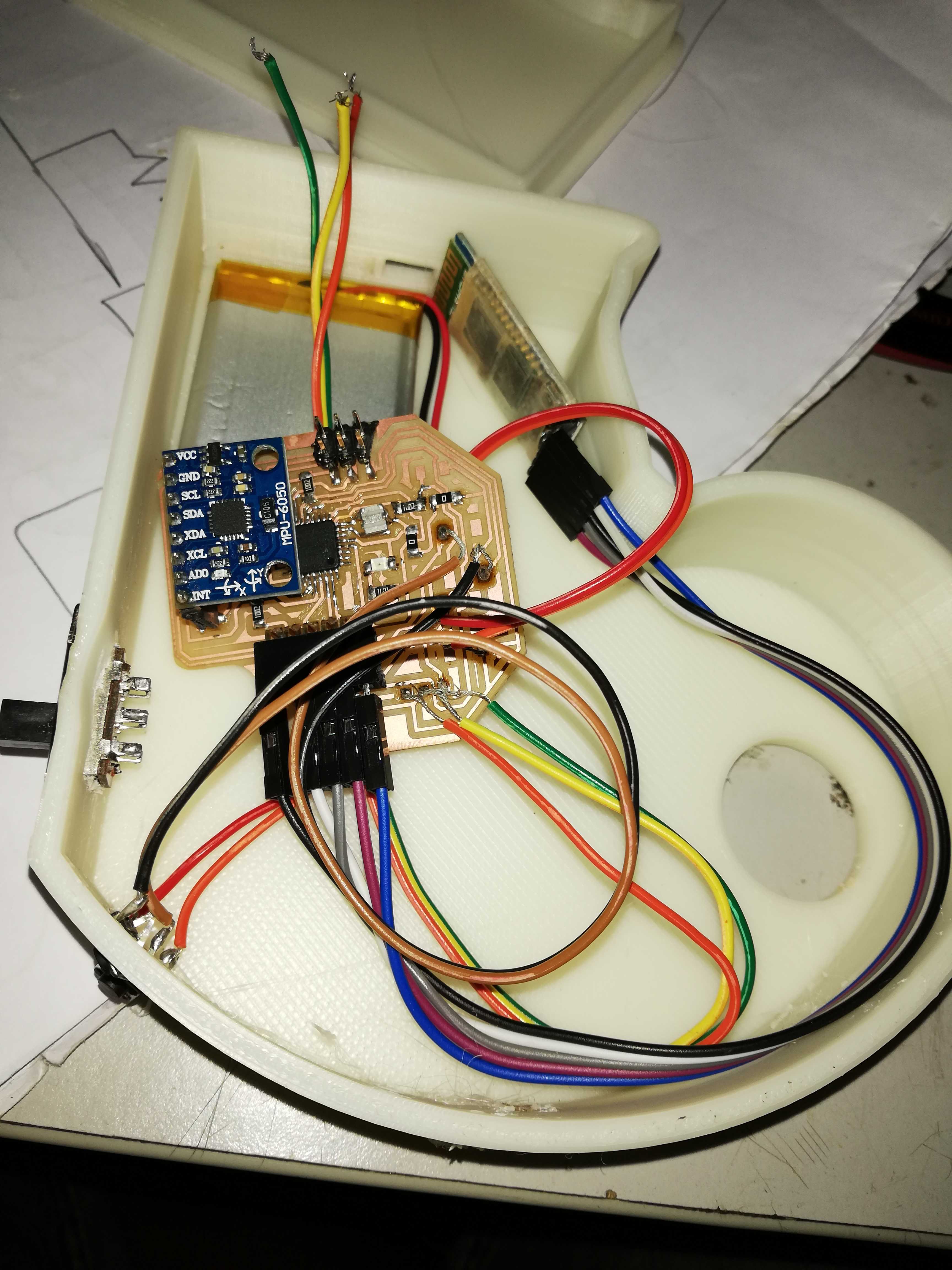
After that I soldered the board and all the modules were connected accordingly.
 Since I want to make it a portable design I provide the external source as LIPO battery
Since I want to make it a portable design I provide the external source as LIPO battery
3.Programming¶
After burning the bootloader I added then necessary library that is needed for running the program and the program was executed.
* Code to control the mouse pointer
* Change values at vx and vy (+300 and -100 in my case)
* using the TEST code to make your project work.
"code"
#include <Wire.h>
#include "I2Cdev.h"
#include <MPU6050.h>
#if I2CDEV_IMPLEMENTATION == I2CDEV_ARDUINO_WIRE
#include "Wire.h"
#endif
MPU6050 mpu;
int16_t ax, ay, az, gx, gy, gz;
int vx, vy;
#define OUTPUT_READABLE_ACCELGYRO
const int leftButton = 9;//enabling left button
const int rightButton =10;//enabling right button
const int mode = 8;
const int laser =A0;//enabling laser button and making the muc on hold condition while enabling the laser
int state;
void setup() {
if I2CDEV_IMPLEMENTATION == I2CDEV_ARDUINO_WIRE
Wire.begin();
#elif I2CDEV_IMPLEMENTATION == I2CDEV_BUILTIN_FASTWIRE
Fastwire::setup(400, true);
endif
pinMode(leftButton,INPUT);
pinMode(rightButton,INPUT);
pinMode(mode,INPUT);
Serial.begin(9600);
mpu.initialize();
}
void loop() {
mpu.getMotion6(&ax, &ay, &az, &gx, &gy, &gz);
vx = (gx+300)/200; // "+300" because the x axis of gyroscope give values about -350 while it's not moving. Change this value if you get something different using the TEST code, chacking if there are values far from zero.
vy = -(gz-100)/200; // same here about "-100"
// digitalWrite(laser,LOW);
Serial.println(vx);
Serial.println(vy);
delay(30);
digitalWrite(laser,HIGH);
delay(20);
}
4.Networking¶
After burning the program to using AVIRSP using usbtiny i tested the serial out put using bluetooth terminal in mobile phone and it was working.
Then I tried to connect between HC05 using binding technique becasue it was unable to send two datas at a time ie.data from x direction and y diection and it did not worked.
After consulting with the instructor he advised me to write a python script which enables th mouse function and wrote the script to import serial data and my instuctor helped me.
import serial.tools.list_ports
# import win32api
# import time
# import math
# import mouse
from pynput.mouse import Button, Controller
comlist = serial.tools.list_ports.comports()
connected = []
com_stmt = "List of COM ports: " if comlist else "No COM ports found"
print(com_stmt)
for index, element in enumerate(comlist):
connected.append(element.device)
print str(index + 1) + ": " + element.device
Flag = False
while comlist and not Flag:
print("Select the COM Port")
selected_port = input() - 1
if -1 < selected_port < len(comlist):
print(connected[selected_port])
Flag = True
else:
print("Wrong COM Port. Try again.")
if Flag:
ser = serial.Serial()
ser.baudrate = 9600
ser.port = connected[selected_port]
ser.timeout = 1
print "COM Port open" if ser.is_open else "COM Port closed"
if ser.is_open:
ser.close()
else:
ser.open()
# with serial.Serial(connected[selected_port], 9600, timeout=1) as ser:
# x = ser.read() # read one byte
# s = ser.read(10) # read up to ten bytes (timeout)
# line = ser.readline()
while 1:
# delay(2);
coord = ser.read_until(';')
print coord
# s = mouse.get_position()
# print s
if ',' and ';' in coord:
# pass
# win32api.SetCursorPos((coord.split(',')[0], coord.split(',')[1]))
# mouse.move(coord.split(',')[0], coord.split(',')[1])
# mouse.move(coord.split(',')[0], coord.split(',')[1], absolute=True, duration=0)
try:
mouse = Controller()
# # Read pointer position
# print('The current pointer position is {0}'.format(
# mouse.position))
# # Set pointer position
# mouse.position = (10, 20)
# print('Now we have moved it to {0}'.format(
# mouse.position))
# Move pointer relative to current position
x = int(coord.split(',')[0])
y = int(coord.split(',')[1][:-1])
# y = y
x = x/10
print x
print y
# print str() + ', ' + str(y)
try:
mouse.move(x,y)
except Exception as e:
print e
# try:
# mouse.move(int(coord.split(',')[0]), int(coord.split(',')[1]))
# except Exception as e:
# print e
# mouse.move(5,-5)
# Press and release
# mouse.press(Button.left)
# mouse.release(Button.left)
# Double click; this is different from pressing and releasing
# twice on Mac OSX
# mouse.click(Button.left, 2)
# Scroll two steps down
# mouse.scroll(0, 2)
except:
pass
if 'lp' in coord:
mouse.press(Button.left)
if 'lr' in coord:
mouse.release(Button.left)
if 'rp' in coord:
mouse.press(Button.right)
if 'rr' in coord:
mouse.release(Button.right)
# for i in range(500):
#x = int(500+math.sin(math.pi*i/100) 500)
#y = int(500+math.cos(i) 100)
#win32api.SetCursorPos((x,y))
#time.sleep(.01)
5.3d Designing¶
First thing I did was I manually drawn as much possible figures that can be made.
Since I was using AUTODESK FUSION 360 for the entire assignments I planned to carry out the same here in the final project too.
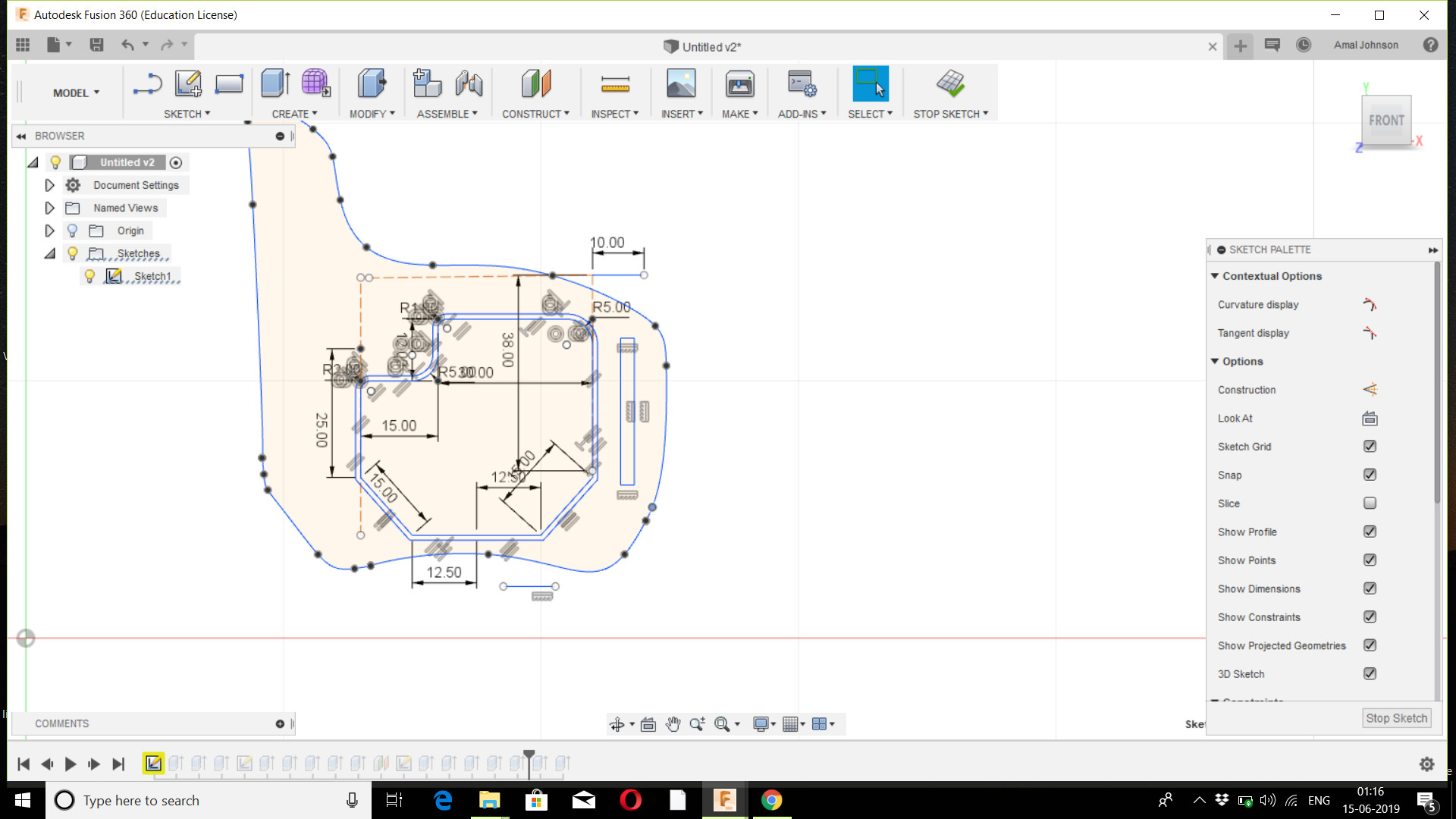
So I designed a 2d designs and extruded and provided the necessary space for fitting all the modules.
But the design was too bulky and I planned to do it again with small space.
So I re-designed and optimized to make it an attachable design to hand.
6.3d Printing.¶
Then the design file was exported to stl and then moved to k slice software

By using K slice software i sliced the design and generated the G-codes
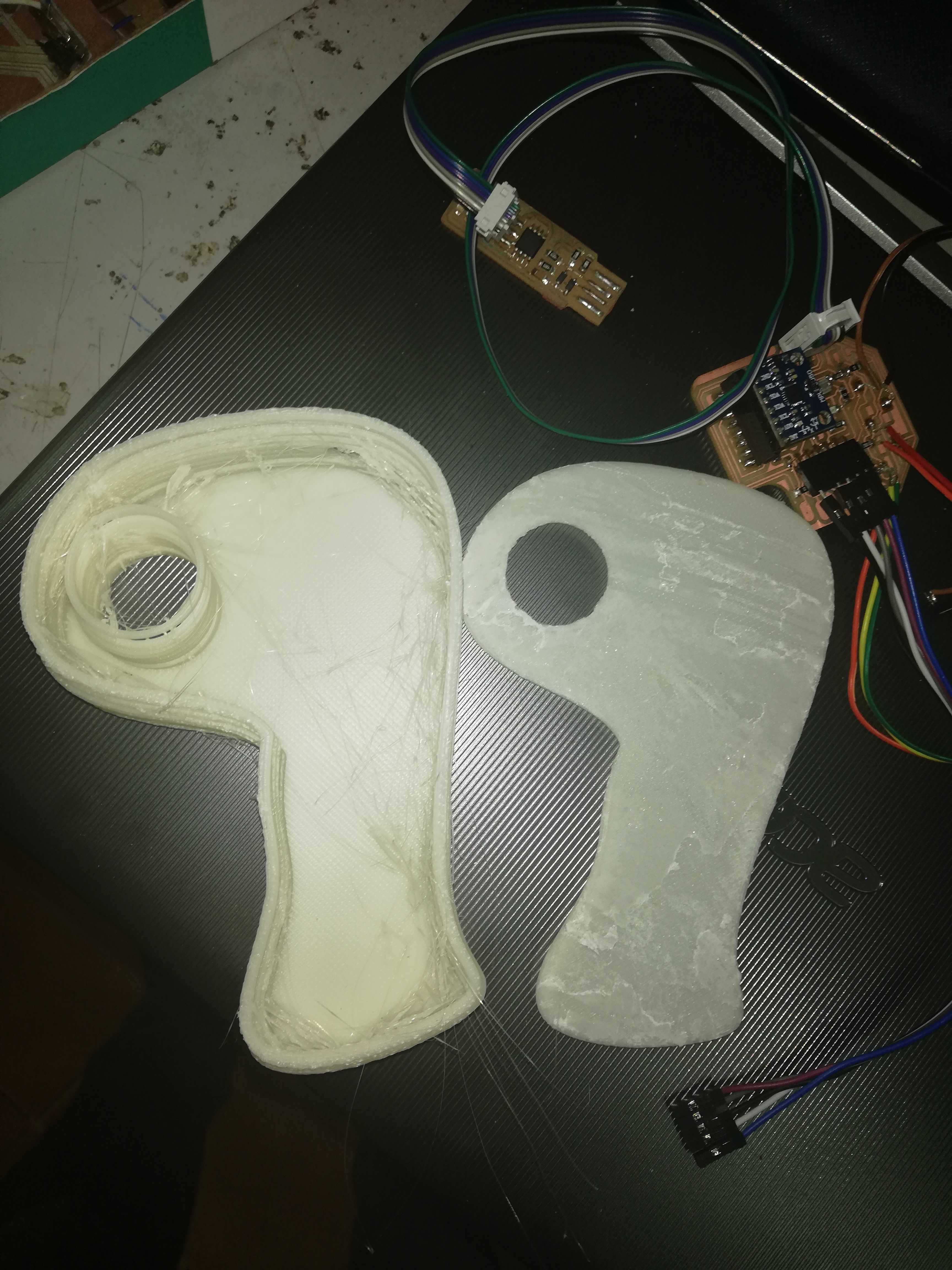
The estimated time was 5 hours for printing

The design was able to print by using divide by zero 3d printer using ABS material.
WORKING¶
Click here to see the itretion 1
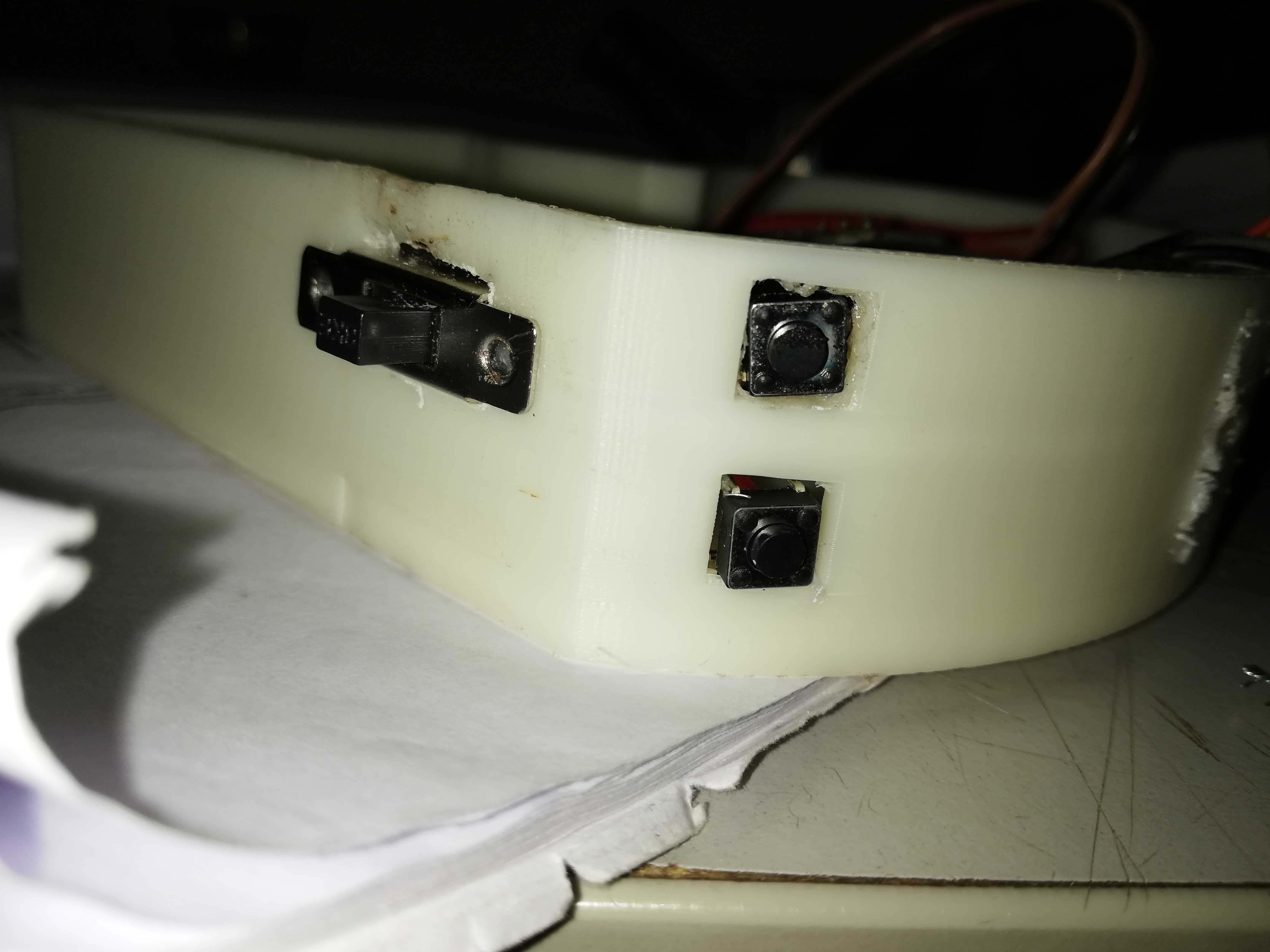
After printing the connections were made and well arranged in th abs printed casing.
Click here to see the itretion 2
After conducting number of iterations the mouse function was optimised and worked.
Click here to see the itretion 2
FILES¶
click here to open the file¶
click here to open the file¶
click here to open the file¶
click here to open the file¶
click here to open the file¶
click here to open the file¶
CLICK HERE TO VIEW THE FINAL PROJECT¶
Presentation poster¶
FINAL PRESENTATION¶