3. Computer Aided design¶
Individual assignment:¶
This week, I had to make a model eg a 3D model for a possible final project. I performed this assignment for my first idea of my final project, namely the Hammerfield.
Note: I had a lot f projects in mind, which I tried during the past month. My Final project is descrideb here: Final project page.
I really like to use 3D programmes for modelling and I do have some experiences in this field.
Prep:¶
Software:
Sketch-up
Fusion 360
Hardware :
Laptop
Results of the assignment:¶
The hammer (Amrah) will be a flying drone but unlike the mighty Allan Pans flying hammer, it must be much more robust to handle a full contact competittion.
To make Amrah preform the feats of Mjolnir I will try 3 options:
1.Brushless motor propeller driven:¶
Propeller driven, by intregreding a drone into the body of amrah just as Allan Pan’s hammer (this option gives the most areal controle but its also the most fragile).
 under construction....FreeCad
under construction....FreeCad
2.Liquid/Gass propulsion:¶
Compressed gass/liquid container with thrusters, a light weight version of the Lockheed Martin’s Multiple Kill Vehicle (this option is the most robust but has the shortest flight time, and is pure theoretical) on the drawing table.
To propel Amrah With water I will use the same principle as the wellknown Water rocket.
{kind=link}
To release the water in a controlled way, I was thinking of a quick thruster mechanism that has to fit in Amrah:

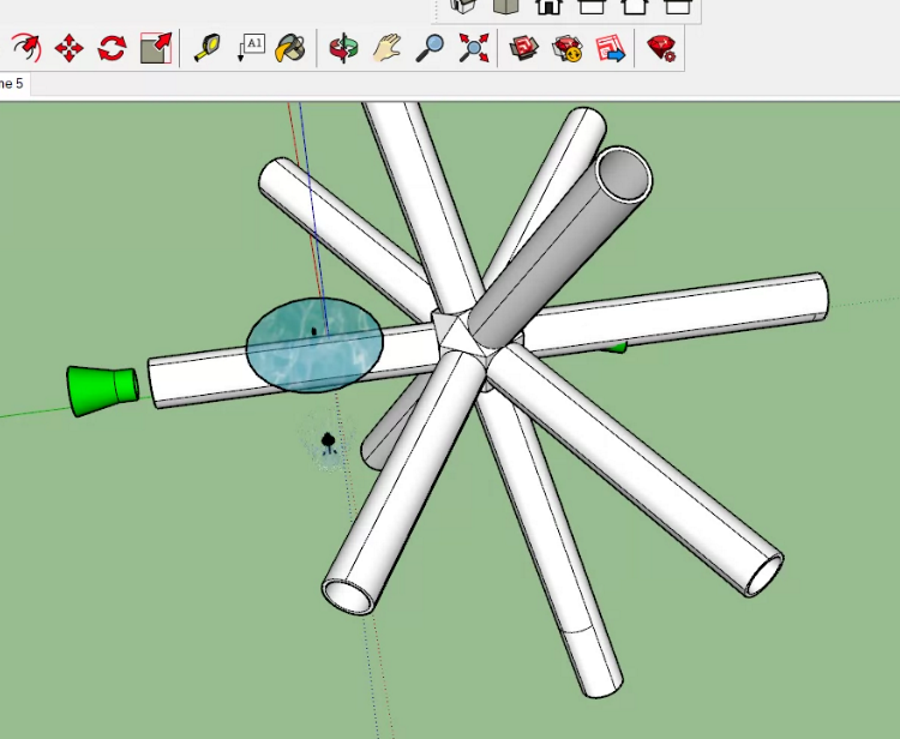
As I was skeching I got the idea to first find a mechanism to maneuver a water rocket with the same precision as the Lockheed Martin’s Multiple Kill Vehicle. So I came up with a concept to change the output direction as fast as possible from thruster to thruster within a certain timeframe. To test the maneuverability of the system, I simplified the mechanism to a spherical designed water rocket that can aplie countertrust without losing waterflow:¶
 Afterwards i will intregate the mechanism in to Amrah.
Afterwards i will intregate the mechanism in to Amrah.
And so the omni directional water rocket was born:
 After graduation, I will build a heavyweight omnidirectional rocket propelled by liquid rocket fuel.
After graduation, I will build a heavyweight omnidirectional rocket propelled by liquid rocket fuel.
Free Cad:¶
At first I tried FreeCad to model the second option but it kept crashing on me.
3.Two-wheel drive:¶
2 wheel driven Amrah with a jumping leg inspired by the Parrot’s Jumping Sumo Robot, (the least inpressive but yet most doable durable option) on the drawing table.
Return to bearer:¶
All of the 3 options must have “return to hand capebility” that can be intercepted by the hammer bearer of the aposing team.
I made a 3D Model of the sphere rocket and its thrusters.
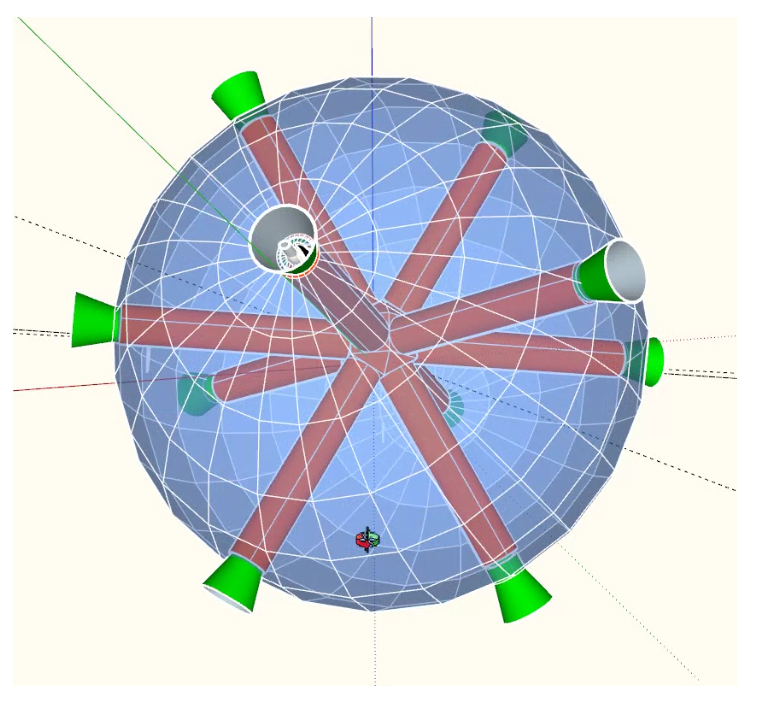
In Sketchup I sketched the concept:¶
Afterwards, I designed the thruster mechanism in Fusion 360:¶
Here I started working with Fusion 360 because Freecad kept crashing on me and because of my Autodesk inventor background Fusion was quit intuitive for me. I was thinking of a way to release the thrust as quick as possible and also close it with the same speed.
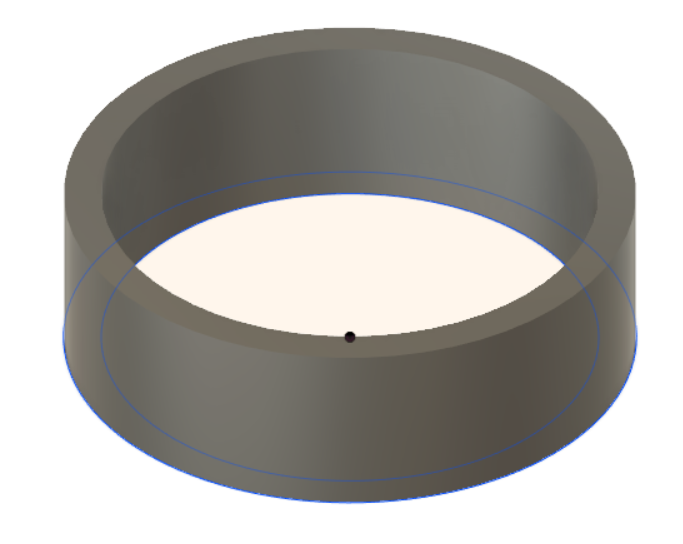
I first start with a sketch:
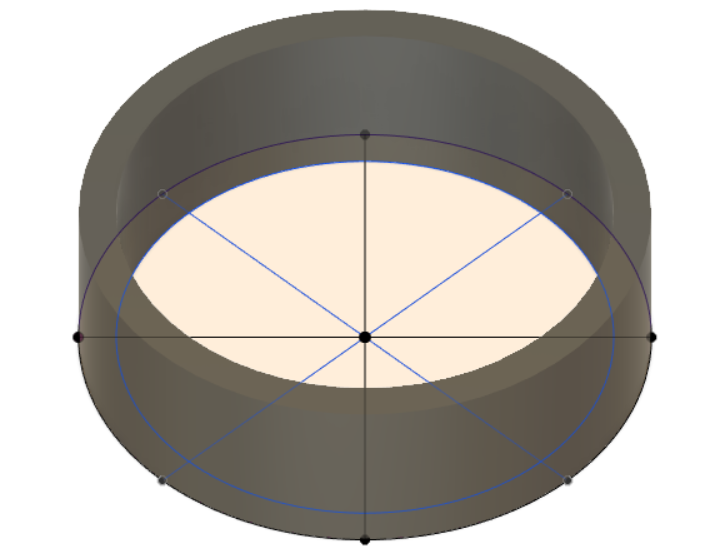
Afterwords extrude with the command “E” to the desired height:
Create a second skech to create the valve openings:
Also extrude them :
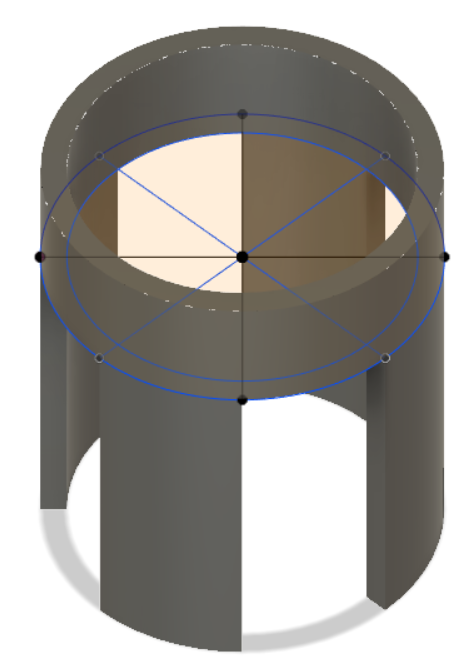
and so on.
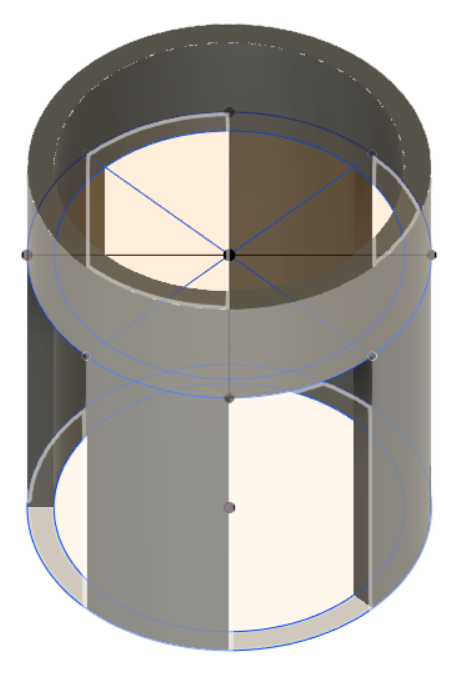
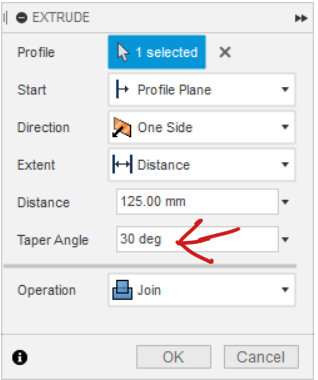
To create a cone you can determine your cone by changing the growth angle of your silinder like so

So this should be tested still.

This release mechanism is based on 2 tighfitting cilinders rotating counter clockwise to open the valve. Because the pressure of the water is not able to stop the rotation of the cilinders you can actuate the open and closing with little fors under high water pressure.
What I learned:¶
Fusion 360, because it was very intuitive for me because of my experience with autodesk inventor.